

但上述文献对车辆侧翻的过程分析着力不多,大多只讨论了内侧车轮离地时对应的速度阈值。事实上,车辆侧翻是一个动态过程,内侧车轮离地并不一定导致车辆的侧翻。如果驾驶员在内侧车轮离地后及时制动,车辆仍有可能安全过弯。本文侧重研究车辆侧翻的全过程,在前人研究的基础上对车辆侧翻做进一步的分析,并讨论了不同因素对内侧车轮离地和车辆侧翻的影响。
1 理论模型概述
1.1 动静法
在惯性系中,受力物体处于平衡状态的充要条件是,其受到的力系可等效为一个零力系,即外力系的主矢量和主矩均为零。众所周知,一个本身具有加速度或者角加速度的物体,并非处于平衡状态。但如果建立与一个物体本身固连的参考系,在此非惯性系下观察,物体处于虚拟的"平衡"状态。受力分析时,除真实的受力${F}$外,还需要加上非惯性系导致的惯性力——牵连惯性力${S}_{\rm e} =- m{a}_{\rm e}$和科氏惯性力${S}_{\rm c} = -m {a}_{\rm c}$,其中${a}_{\rm e}$为牵连加速度,${a}_{\rm c}$为科氏加速度。此时物体的受力可以等效成零力系,即将一个动力学问题简化为静力平衡问题求解[6]:$F + {S}_{\rm e} + S_{\rm c}= 0$,这就是“动静法”。需要指出的是,这里研究对象是质点,如果是刚体,公式会更复杂一些。
1.2 模型建立与受力分析
货车转弯时,地面对车轮的摩擦力指向弯道的曲率中心,用于提供车转弯时的向心力。为保持车的力矩平衡,外侧车轮受到的支持力会大于内侧车轮,当车速过大时,将造成内侧车轮脱离地面,甚至车辆的侧翻[1]。
对车及其运动做如下理想化假设:(1) 不考虑车的悬架结构;(2) 不考虑轮胎的形变;(3) 不计车轮的宽度;(4) 认为车的质量在车前进方向均匀分布;(5) 转弯时同侧前、后轮受力情况相同,可以等效为一个轮。
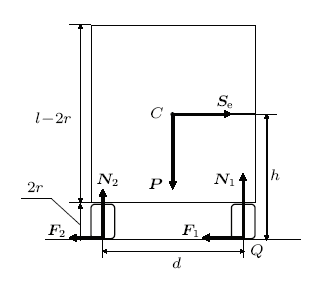
车转弯时的运动为定轴转动,转动轴过弯道的曲率中心。取与车固连的非惯性系,由动静法,假想车受到一个牵连惯性力$S_{\rm{e}}$。画出车转弯时的受力图,如图1所示。
图1中$C$为车的质心,$C$点离地高度为$h$;设轮子半径为$r$,车高为$l$,两轮间距为$d$,$Q$为转弯时外侧车轮与地面的接触点。车重为$P$,外侧车轮受到地面的支持力为$N_{1}$,静摩擦力为$F_{1}$,内侧车轮受到地面的支持力为$N_{2}$,静摩擦力为$F_{2}$。
图1
1.3 倾斜临界速度
转弯时为保持车身力矩平衡,$N_{1}$将大于$N_{2}$,且两者之差随车速的增大而增大。当车速达到某个值时,$N_{2}$减小为零,内侧车轮开始离地,我们将这一速度称为倾斜临界速度$v_{\rm{t}}$,这里的"速度"仅指速度矢量的大小,是等同于速率的标量。下面推导$v_{\rm{t}}$的表达式。
由图1中车对$Q$点力矩平衡条件,可得
令车速为$v$,转弯半径为$R$,则牵连惯性力$S_{\rm{e}} = \dfrac{Pv^{2}}{gR}$。当内侧车轮刚脱离地面时,$N_{2}=0$,代入式(1)解得倾斜临界速度
若倾斜时外侧车轮不滑动,地面摩擦力$F_{1}$需满足$F_{1}\leq f N_{1}$。由车在水平和竖直方向受力平衡,得
联立解得
1.4 侧翻过程分析
内侧车轮离地后,车将开始倾斜。出于本能,此时驾驶员将会采取制动措施,降低车速。这里首先分析车在制动过程中牵连惯性力的变化。
车前进时的动能$T = \dfrac{P}{2g}v^{2}$,设制动力矩为$M$,车轮转过的角度为$\varphi$,由动能定理
由纯滚动条件$\mathrm{d}\varphi =\dfrac{v}{r}\mathrm{d}t$,代入整理得
由式(7)可知$\dot{v}$与时间$t$无关,因此车做匀减速度运动,设车入弯的速度为$v_{0}$,则$v = v_{0}-\dfrac{Mg}{Pr}t$,牵连惯性力
侧翻过程中,车受力情况如图2所示。
图2
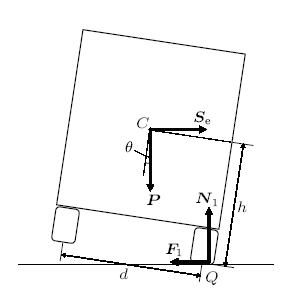
取与车的质心固连、绕弯道中心做定轴转动的非惯性系,车在此非惯性系中绕过$Q$点且与车前进方向平行的轴做定轴转动。
由对$Q$的动量矩定理,得
式中$J_{Q}$为车对$Q$的转动惯量,其计算方法如下。
将车视为重$P$的长方体,由图1可以计算得,车对通过$C$点且沿前进方向的轴的转动惯量$J_{C}=\dfrac{P}{12g}\left( d^{2}+l^{2}\right)$,由平行轴定理,对$Q$点的转动惯量$J_{Q} = J_{C} + \dfrac{P}{g}\Big[\Big(\dfrac{d}{2} \Big)^{2}+h^{2} \Big]$,整理得
若车的质心在地面的投影在$Q$点右侧,则车侧翻,即
得侧翻临界角
当$\theta > \theta _{\rm{r}}$时侧翻。若车的角速度小于等于零,且未侧翻,则安全过弯,即$\theta \leq \theta_{\rm{r}}$且$\dot{\theta }\leq 0 $。
2 数值计算
2.1 倾斜临界速度
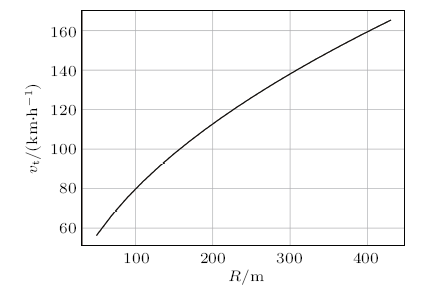
由式(2)和上述参数,可以得到倾斜临界速度$v_{\rm{t}}$与转弯半径$R$的关系曲线,如图3所示。由图可知,$v_{\rm{t}}$随$R$的减小而减小,转弯半径越小,车越容易倾斜。当转弯半径为150m左右时,倾斜临界速度已经与高速公路上的车速相近。
图3
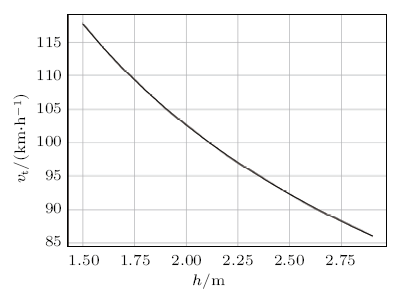
取$R=150$m,改变车的质心高度$h$,得到$v_{\rm{t}}$与$h$的关系曲线,如图4所示。由图可知,$v_{\rm{t}}$随$h$的增大而减小,质心高度越大,车越容易倾斜。
图4
由式(5)可得摩擦系数
$$ f\geq 0.5 $$
由式(12)可得侧翻临界角
$$ \theta_{\rm{r}}\approx 26.6^{\circ} $$
2.2 侧翻临界速度
若车进入弯道的速度$v_{0} \leq v_{\rm{t}}$,则车不会倾斜,因而不会侧翻;若$v_{0} > v_{\rm{t}}$,且司机不制动,则车持续向外倾斜,牵连惯性力的力矩不断增大,重力的力矩不断减小,车将加速侧翻。若车开始倾斜时驾驶员马上制动,则在$v_{0}$不太大的情况下,车有可能倾斜一定角度后摆回$\theta =0$的位置,安全过弯。我们将驾驶员制动的情况下,能使车安全过弯的$v_{0}$的最大值称为侧翻临界速度$v_{\rm{r}}$。
对于给定的初速$v_{0}$,由2.4中的分析可以计算出$\theta$随时间$t$的变化情况。编写程序计算,程序的基本思路如下:
(1) $t=0$时,设定$\theta_{0}=0$,$\dot{\theta}_{0}=0$;
(2) 在$t$时刻,由$\theta_{t}$,$S_{\rm{e}}(t)$和给定参数计算$\ddot{\theta}_{t}$;
(3) 在$t+dt$时刻,更新$\theta $和$\dot{\theta }$:$\theta_{t+dt}=\theta_{t}+\dot{\theta }_{t}dt$,$\dot{\theta}_{t+dt}=\dot{\theta}_{t}+\ddot{\theta}_{t}dt$,$t=t+dt$;
(4) 重复(2)和(3),直到车安全过弯或侧翻。
取$R=150$m,对于不同的初速$v_{0}$,计算得到$\theta$随时间$t$的变化关系,如图5所示。
图5
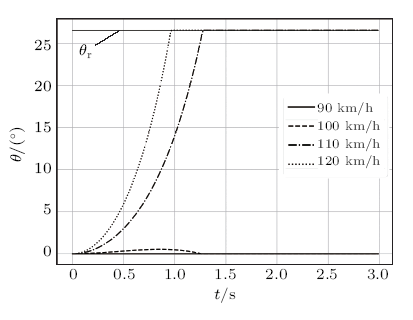
由图5可知,对于不同的$v_{0}$,$\theta$的变化出现了较大的分化,当$v_{\rm{t}}\leq v_{0}\leq 100$km/h时,$\theta$先增大后减小,最终减小至零,表明车倾斜一定角度后能够回到安全状态;当$v_{0}\geq 110$km/h时,$\theta $单调递增直至$\theta _{\rm{r}}$,且$v_{0}$越大,$\theta$的增速越快,表明车不能回到安全状态,会发生侧翻。
由此可知,上述计算中的侧翻临界速度$v_{\rm{r}}$在(110km/h, 120km/h)之间,用多次迭代,两侧逼近的方法可以得到$v_{\rm{r}}$更精确的值。下面分析各个参数对$v_{\rm{r}}$的影响,并与$v_{\rm{t}}$进行比较。
改变转弯半径$R$,固定其他参数,得到$v_{\rm{r}}$和$v_{\rm{t}}$随$R$的变化关系,如图6所示。
图6
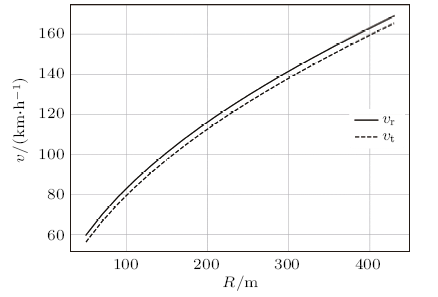
由图可知,随着$R$的增大,$v_{\rm{r}}$单调递增,变化与$v_{\rm{t}}$相似,值略大于$v_{\rm{t}}$,且两者之差基本保持不变。这说明对于曲率半径越小的弯道,车越容易倾斜,同时也越容易侧翻,且倾斜后发生侧翻的概率与转弯半径无关。
改变车的质心高度$h$,固定其他参数,得到$v_{\rm{r}}$和$v_{\rm{t}}$随$h$的变化关系,如图7所示。
图7
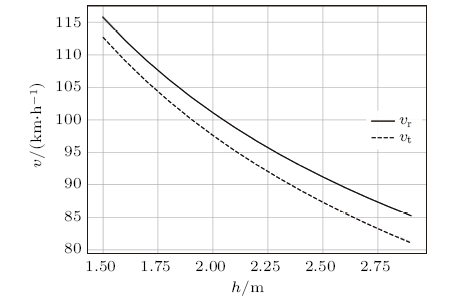
由图可知,随着$P$的增大,$v_{\rm{r}}$单调递减,变化与$v_{\rm{t}}$相似,值略大于$v_{\rm{t}}$。这说明对于载重一定的货车,合理安放货物的位置,使质心的高度尽可能低,可以增大侧翻临界速度,提高车转弯时的安全性。
改变车重$P$,固定其他参数,得到$v_{\rm{r}}$和$v_{\rm{t}}$随$P$的变化关系,如图8所示。
图8
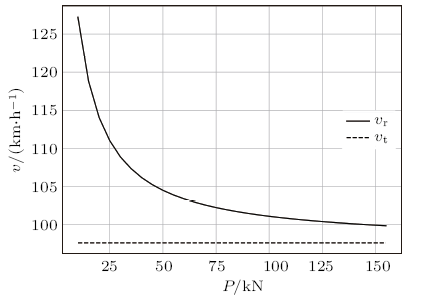
由图8可知,随着$P$的增大,$v_{\rm{t}}$保持不变,$v_{\rm{r}}$类似于反比例递减,两者之差越来越小。这说明车是否会倾斜与车重无关,但减小车重能降低侧翻的可能性。车重越小,倾斜后能将车"挽救"回安全状态,避免侧翻的可能性就越大;车重越大,两个临界速度就越接近,从倾斜到侧翻的差距也越小,因此重型车的倾斜往往意味着侧翻。可见,避免超载对于保证货车的安全性非常重要。
改变制动力矩$M$,固定其他参数,得到$v_{\rm{r}}$和$v_{\rm{t}}$随$M$的变化关系,如图9所示。
图9
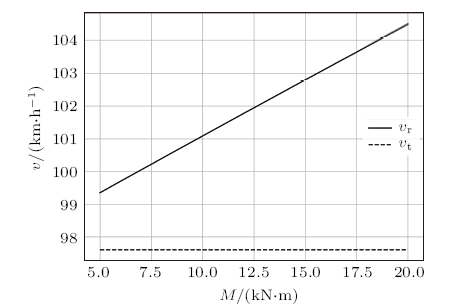
由图可知,$v_{\rm{t}}$与$M$无关,$v_{\rm{r}}$随$M$的增加线性增加,但变化幅度不大,这是因为从倾斜到侧翻的过程只有短短几秒,制动带来的减速效果并不明显。考虑到制动力矩的大小受到摩擦片及传动机构的限制,其对车辆防侧翻的保护很有限。因此,在入弯前降低车速比入弯后制动,对防止侧翻来说更有效。
3 结论
本文利用动静法的思想,分析了货车转弯时的物理现象。货车转弯时,在与车固连的非惯性系中受到牵连惯性力的作用。当入弯车速小于倾斜临界速度($v_{0}$ < $v_{\rm{t}}$) 时,内侧车轮始终与地面接触,车不会侧翻;当入弯车速大于倾斜临界速度($v_{0}$ > $v_{\rm{t}})$时,内侧车轮会离地,车以一定角加速度开始倾斜,此时必须减速才可能避免侧翻。若开始倾斜时的车速小于侧翻临界速度($v_{0}\leq v_{\rm{r}})$,则车倾斜一定角度后能回到安全状态;反之若$v_{0} > v_{\rm{r}}$,则车必会侧翻。经分析,$v_{\rm{t}}$和$v_{\rm{r}}$均随车的质心高度的增大而减小,随转弯半径的增大而增大,$v_{\rm{t}}$与车重、制动力矩无关,$v_{\rm{r}}$ 随车重的增大而迅速减小,随制动力矩的增大而略有增大。
因此,基于本简化模型的分析结果,为避免货车转弯时侧翻,建议司机:(1)装货物时应尽可能降低车的质心高度;(2)不能超载;(3)不能超速,且低速入弯比进入弯道后再减速更安全。
参考文献
基于动态TTR的重型货车主动防侧翻控制研究. [硕士论文]
Research on active anti-rollover control of heavy-duty truck based on dynamic TTR. [Master Thesis]
Research on parameter identification and multi-target braking force distribution for heavy duty vehicle. [Master Thesis]
重型载货汽车底盘性能设计参数控制研究. [博士论文]
A study on design parameters control of performance of heavy duty truck chassis. [PhD Thesis]
基于ADAMS的汽车侧翻仿真分析与研究
Analysis and research of vehicle rollover simulation based on ADAMS

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}