小行星被称作太阳系中的"活化石",其研究对于揭示太阳系起源、行星演化、生命起源等具有重要意义。此外,小行星防御又是一件关乎整个地球命运的事情。因此,随着航天技术的发展,小行星逐渐成为天文学研究和深空探测领域的热点话题之一。近年来,两个小行星采样返回任务:日本的隼鸟2号(Hayabusa 2)和美国的欧西里斯(OSIRIS-REx)任务都极大地吸引了人们的目光[1 ] 。而且,隼鸟2号已经从小行星162173Ryugu (龙宫)采到样本,并于2020年12月将样品成功送回地球[2 ] 。欧西里斯任务也于2020年10月成功从小行星101955 Bennu (贝努)采到足够样本[3 ] 。我国目前在小行星探测方面仍处于起步阶段,对小行星的探测仅仅限于2012年12月,嫦娥2号利用剩余燃料对小行星4179 Toutatis (图塔蒂斯)进行的飞越探测[4 ] 。2019年4月,国家航天局正式宣布我国的第一个小行星探测任务,拟计划先对近地小行星2016 HO3进行采样返回,再去探测主带彗星311P[5 ] ,这一任务很可能被命名为``郑和号''[6 ] 。这一任务将是人类历史上第一次对十米级小行星的探测以及采样返回,也是人类首次对地球准卫星(小行星2016 HO3同时是一颗地球准卫星)和主带彗星的探测,因此面临史无前例的挑战。
与大天体不同,小行星体积较小且外形不规则,因此,小行星引力场并不规则且较为微弱。同时,小行星不规则的外形也导致了小行星地形的复杂性,再加上小行星的快速自旋[7 -8 ] ,使得小行星表面动力学成为一个世界性难题。然而小行星表面动力学又在一些小行星探测任务中扮演着重要角色[9 ] ,例如:着陆位置及采样点的选择,着陆器、表面巡视器以及标记球的部署与控制等均需要对小行星表面动力学进行研究。此外,小行星表面动力学的研究对于小行星地表演化过程的揭示也具有重要意义[10 -11 ] 。
对于小行星表面动力学这一问题,前人的研究多集中于物体在小行星表面运动轨迹的计算。Sawai等[12 ] 最先对此类问题进行了研究,研究了质点在旋转椭球体表面的运动,Liu等[13 ] 则研究了质点在均质旋转立方体表面的运动。Tardivel等[14 ] 将质点运动改进为球形舱的运动,此后,Van Wal等[15 ] 进一步进行了改进,使其可以对任意形状物体在小行星表面自由运动轨迹进行计算。Hockman等[16 ] 使用简化动力学模型对小行星表面弹跳运动进行规划。Liu等[17 ] 则对小行星表面弹跳轨迹进行优化。Zhang等[18 ] 通过数值仿真计算得出小行星Bennu表面物体具有趋向其赤道附近区域运动趋势,并揭示其动力学机理。实际上,小行星表面物体运动十分复杂,对其运动轨迹进行精确仿真并不现实。因此,对小行星表面动力学环境进行分析,如表面物体运动趋势的分析及自发运动行为的判断等不失为研究小行星表面物体运动规律的一种可行方法。Zhang等[19 ] 对近球形、纺锤形、哑铃形三类小行星在不同参数下进行了表面动力学环境分析,并给出一般性结论。
本文则具体以小行星2016 HO3为例,对小行星表面动力学环境进行分析,主要研究物体在小行星表面自由运动趋势及可否产生自发运动。第1节给出相关具体研究方法和理论。第2节针对小行星2016 HO3,给出数值仿真结果。第3节则根据仿真结果,论述了我国未来针对小行星2016 HO3采样返回任务中可能存在的部分难点与挑战。第4节总结全文。
1 小行星表面动力学环境分析方法
本节针对小行星表面物体所处动力学环境,从物体在小行星表面的自由运动趋势及物体能否产生自发运动两方面分别进行研究。
1.1 物体自由运动趋势分析
物体在小行星表面自由运动趋势取决于小行星表面有效势分布,物体具有从有效势高的位置向有效势低的位置运动的趋势[18 -20 ] 。在对小行星表面物体运动进行研究时,通常利用多面体模型对小行星进行建模。Yu等[21 ] 给出可用于小行星表面的多面体模型引力势及其梯度计算公式分别为
(1) $\hspace{-8mm}U=-\frac{1}{2}G\sigma \left( {\sum\limits_{e\in ES} {{ r}_{e} } \cdot P_{e} ({ r})-\sum\limits_{f\in FS} {{ r}_{f} } \cdot Q_{f} ({ r})} \right)$
(2) $\nabla U=G\sigma \left( {\sum\limits_{e\in ES} {P_{e} } ({ r})-\sum\limits_{f\in FS} {Q_{f} } ({ r})} \right)$
式中,$G$为万有引力常数,$\sigma$为多面体密度。$FS$表示多面体的所有侧面构成的集合,$ES$表示多面体所有棱边构成的集合,变量$ r_{e}$和$ r_{f}$分别是从测试点指向棱$e$和面$f$任意一点的矢量。$P_{e}( r)$和$Q_{f}( r)$为分段函数,有
(3) $P_{e} ({ r})=\left\{ {{\begin{array}{ll} 0, & {{ r}\in e} \\ {L_{e}^{\ast } { E}_{e} \cdot { r}_{e} }, & {{ r}\notin e} \\\end{array} }} \right.$
(4) $Q_{f} ({ r})=\left\{ {{\begin{array}{ll} 0, & {{ r}\in \bar{{f}}} \\ {\theta_{f}^{\ast } { F}_{f} \cdot { r}_{f} }, & {{ r}\notin\bar{{f}}} \\\end{array} }} \right.$
另外,在式(1)引力势$U$基础上,加入离心项,则小行星本体系下位置$ r$处有效势可以写为
(5) $V=U-\frac{1}{2}\left( {{ \omega }\times { r}} \right)\cdot \left({{ \omega }\times { r}} \right)$
由此可得小行星附近任意一点处有效势大小。根据小行星表面有效势大小分布,即可判断小行星表面物体自由运动趋势[19 ] 。
1.2 物体能否自发运动判定
物体在小行星表面能否产生自发运动应从两方面进行考虑,一是判断物体是否会自发起飞,二是物体是否自发滑动。
针对自发起飞而言,物体在小行星表面有效加速度(引力加速度与离心加速度之和)为
(6) ${ a}_{{\rm c}} =-\nabla U-{ \omega }\times \left( {{ \omega }\times { r}} \right)$
(7) ${ a}_{{\rm cn}} =\left( {{ a}_{\rm c} \cdot { n}} \right){ n}$
式中$ n$为小行星表面局部单位外法向量。切向分量则可由
(8) ${ a}_{\rm ct} ={ a}_{{\rm c}} -{ a}_{{\rm cn}}$
(9) ${ a}_{\rm c} \cdot { n}>0$
针对自发滑动,如果小行星表面有效加速度法向分量向内,即不满足自发起飞条件时,物体在小行星表面则可能产生自发滑动。设小行星与物体间静摩擦系数为$\mu_{\rm s}$,则物体自发滑动条件为
(10) $\left\| a_{\rm ct} \right\|\geqslant \mu_{\rm s} \left\| a_{\rm cn} \right\|$
此时最大静摩擦力不足以克服引力与离心力在切向的分力,物体会自发滑动。
(11) $\mu_{\rm c} =\frac{\left\| {{ a}_{\rm ct} } \right\|}{\left\| {{ a}_{\rm cn} } \right\|}$
将临界摩擦系数$\mu_{\rm c}$与取决于接触面实际粗糙程度的静摩擦系数$\mu_{\rm s}$相比,即可判定物体是否可以自发滑动。因此,自发滑动条件也可以写为
(12) $\mu_{\rm c} \geqslant \mu_{\rm s}$
由于与接触面实际粗糙程度无关,临界摩擦系数$\mu_c$还可以用来定量地描述物体自发滑动的难易程度。在接触面实际粗糙程度相同的前提下,临界摩擦系数$\mu_c$越小的位置,物体越不容易产生自发滑动;反之,如果临界摩擦系数很大,实际中静摩擦系数几乎不可能达到临界摩擦系数的值,则可以认为大多数材质的物体在此位置都一定会发生自发滑动现象[19 ] 。
2 小行星2016 HO3表面动力学环境仿真计算
小行星2016 HO3目前暂没有公开的多面体数据,无法直接应用第1节中公式进行计算分析。本文为对其表面动力学环境进行粗略研究,先根据Li等[22 ] 给出的数据,将2016 HO3建模为58.8 m $\times$ 28.2 m $\times$ 28.2 m的三轴椭球,其自转周期为0.467 h,等效半径为18.0 m,密度为2 700 kg/m$^{3}$。以三轴椭球质心为坐标原点,长轴作为$x$轴,由于椭球另外两轴半径相同,任取一通过坐标原点且垂直$x$轴方向作为$z$轴正方向,并假设小行星自转角速度方向与该方向重合,再选取$y$轴使其构成右手直角坐标系。之后利用开源网格划分程序distmesh[23 ] 将小行星2016 HO3的椭球模型划分为具有6470个顶点,12 936个面的多面体,至此,可以使用第1节中公式对2016 HO3进行计算分析。此处虽可以不进行多面体网格划分,直接使用椭球模型对小行星2016 HO3进行研究,但为了表明方法对于任意外形小行星的通用性,仍对小行星2016 HO3的椭球模型进行多面体网格划分后再进行研究分析。
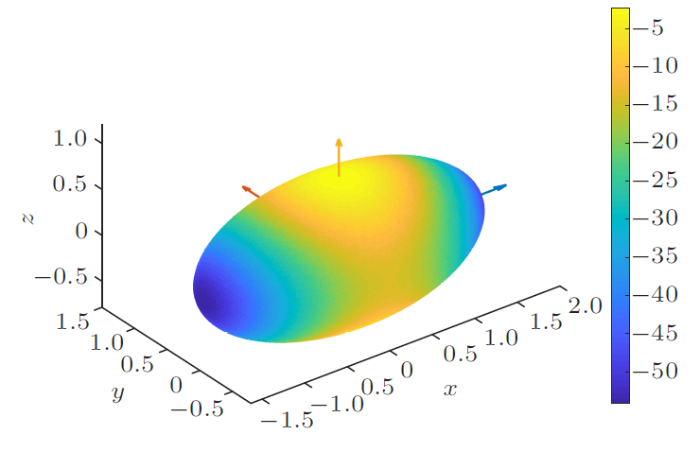
在数值计算中,对12 936个三角形侧面,通过第1节中各式分别计算每个侧面中心位置点的有效势、临界摩擦系数等各物理量,并将其近似作为该三角形侧面上所有位置的对应物理量取值。计算采用归一化计算,长度归一化单位为2016 HO3等效半径,时间归一化单位为其自转周期。将2016 HO3表面有效势分布图给出,如图1 所示。为了更好地展示小行星2016 HO3表面有效势的全局分布,本文同时将2016 HO3表面有效势按经纬度投影在平面中,如图2 所示。其中,经度$\theta$与纬度$\phi $定义分别为
(13) $\theta =\left\{ {\begin{array}{ll}\arccos \dfrac{x}{\sqrt {x^{2}+y^{2}} }, & y\geqslant 0 \\ 2\pi -\arccos \dfrac{x}{\sqrt {x^{2}+y^{2}} }, & y<0 \\ \end{array}} \right.$
(14) $\phi =\arctan \frac{z}{\sqrt {x^{2}+y^{2}} }$
图1
图1
小行星2016 HO3表面有效势$V$分布图(归一化单位)
图2
图2
小行星2016 HO3表面有效势$V$分布投影图(归一化单位)
由图1 和图2 结合可以看出小行星2016 HO3表面有效势分布特点为:$z$轴方向两短轴端点处有效势最高,两长轴端点处有效势最低,且总体上随$x$轴绝对值增大,有效势逐渐降低。因此,小行星2016 HO3表面物体具有趋向其长轴两端点处运动的趋势。
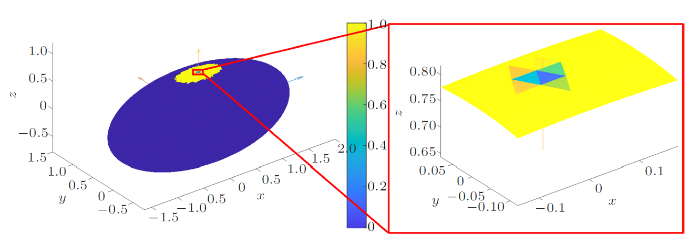
针对小行星2016 HO3表面物体自发运动情况,给出计算所得自发运动区域分布图如图3 所示。在图3 中,深蓝色区域表示物体在此位置可以自发起飞;亮黄色区域表示临界摩擦系数较大(大于1),因此大部分材质物体在此位置都会产生自发滑动现象;其余颜色区域对应临界摩擦系数小于1,物体在这些区域相对而言不易发生自发运动。可以看出,小行星2016 HO3表面大部分区域都为可自发起飞区域,小部分区域为物体很容易自发滑动的区域,只有极点附近极小部分区域物体不易发生自发运动。
图3
图3
小行星2016 HO3表面物体自发运动区域分布图(归一化单位)
3 小行星2016 HO3采样任务部分难点与挑战论述
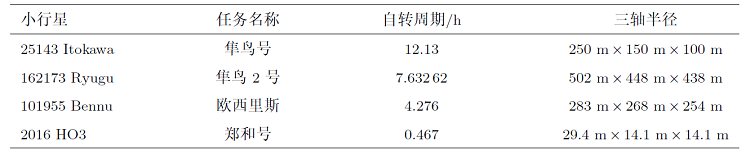
目前人类共开展了3次小行星采样返回任务,将所对应3颗目标星与我国拟开展的小行星采样返回任务目标星2016 HO3主要参数列出如表1 所示。通过表1 可以看出与其他三颗小行星相比,小行星2016 HO3体积明显更小,自转却明显更快。正是这些特性,决定了如第2节中所讲的小行星2016 HO3与其他小行星不同的表面动力学环境特性,从而决定对其采样具有更高难度。
本节拟从小行星2016 HO3表面动力学环境入手,分析任务中的难点所在,具体如下:
(1) 由于在小行星2016 HO3表面,物体大概率会发生自发运动,因此着陆器、表面巡视器甚至标记球在不施加外力情况下均无法停放表面。如果要使用标记球进行近距离导航,则将标记球投放并安置在表面将是任务一大难点。如果要放置着陆器或表面巡视器,同样需要使其具备自主附着小行星表面的能力。
(2) 由于小行星2016 HO3表面存在大片可自发起飞区域,其表面不太可能为碎石堆结构或风化层,而一定具有较强结构力,且有可能是一块完整的石块。因此,其他3个小行星采样任务中所用采样装置很可能并不适用于对小行星2016 HO3进行采样。具体而言,无论是隼鸟号及隼鸟2号通过子弹撞击溅起采样物的方式[2 ,26 ] 还是欧西里斯号通过喷出压缩氮气扬起采样物的方式[3 ] ,都只适用于碎石堆地形或风化层地形等样品颗粒较小且结构力较小的采样标,对于具有较强结构力的2016 HO3并不容易获得足够样品。为此,我国需要对采样装置进行自主创新设计,这无疑是小行星采样任务中的又一关键难点与挑战。
(3) 在其他3个小行星采样任务中,目标小行星表面均不存在可自发起飞区域,在采样过程中,探测器完全可以仅靠小行星引力实现采样器与小行星表面贴合。而针对小行星2016 HO3,在采样过程中则需要对采样装置时刻提供合适大小推力,才能保持其与小行星表面贴合,从而完成采样。
(4) 在探测器接近小行星表面的末制导段,探测器需要主动施加推力才能实现与小行星表面的附着。这与在大天体探测任务以及其他3个小行星采样任务中,探测器靠引力下降,通过反推实现减速或软着陆的方式完全不同。因此,探测器末制导控制策略的设计与工程实施也成为任务一大挑战。
4 结论
本文针对小行星表面动力学环境,从物体在小行星表面自由运动趋势与能否产生自发运动两方面进行研究。以小行星2016 HO3为研究对象进行仿真计算,发现物体在小行星2016 HO3表面大部分区域均可自发起飞,且具有向长轴两端点运动的趋势。最后根据这些特点,从小行星表面动力学环境入手,论述了我国未来针对小行星2016 HO3采样任务与国际上其余小行星采样任务相比所面临的更多史无前例的困难与挑战。
参考文献
View Option
[1]
Hirabayashi M Nakano R Tatsumi E , et al . Spin-driven evolution of asteroids' top-shapes at fast and slow spins seen from (101955) Bennu and (162173) Ryugu
Icarus 2020 , 352 :113946
DOI
URL
[本文引用: 1]
[3]
https://www.asteroidmission.org/asteroid-operations/
URL
[本文引用: 2]
[4]
李俊峰 , 曾祥远 , 张韵 . 小行星的奇特动力学
力学与实践 , 2016 , 38 (6 ):603 -611
[本文引用: 1]
Li Junfeng Zeng Xiangyuan Zhang Yun . Unique dynamics of asteroids
Mechanics in Engineering 2016 , 38 (6 ):603 -611 (in Chinese)
[本文引用: 1]
[5]
https://baijiahao.baidu.com/s?id=1697979653579669113&wfr=spider&for=pc/
URL
[本文引用: 1]
[6]
Zhang X Huang J Wang T , et al . ZhengHe--a mission to a near-Earth asteroid and a main belt comet
LPI 2019 (2132 ):1045
[本文引用: 1]
[7]
Wei W Wu D Mengali G , et al . Asteroid hovering missions from a fuel-consumption viewpoint
Journal of Guidance, Control, and Dynamics 2020 , 43 (7 ):1374 -1382
DOI
URL
[本文引用: 1]
[8]
Zhang Y Zeng X Liu X . Study on periodic orbits around the dipole segment model for dumbbell-shaped asteroids
Science China Technological Sciences 2018 , 61 (6 ):1 -11
DOI
URL
[本文引用: 1]
[9]
Yoshikawa K Sawada H Kikuchi S , et al . Modeling and analysis of Hayabusa 2 touchdown
Astrodynamics 2020 , 4 :119 -135
DOI
URL
[本文引用: 1]
[10]
Yu Y Richardson DC Michel P , et al . Numerical predictions of surface effects during the 2029 close approach of asteroid 99942 Apophis
Icarus 2014 , 242 :82 -96
DOI
URL
[本文引用: 1]
[11]
Yu Y Michel P Hirabayashi M , et al . The dynamical complexity of surface mass shedding from a top-shaped asteroid near the critical spin limit
Astronomical Journal 2018 , 156 :59
DOI
URL
[本文引用: 1]
[12]
Sawai S Kawaguchi J Scheeres DJ , et al . Development of a target marker for landing on asteroids
Journal of Spacecraft and Rockets 2001 , 38 (4 ):601 -608
DOI
URL
[本文引用: 1]
[13]
Liu XD Baoyin HX Ma XR . Dynamics of surface motion on a rotating massive homogeneous body
Science China: Physics, Mechanics & Astronomy 2013 , 56 (4 ):818 -829
[本文引用: 1]
[14]
Tardivel S Scheeres DJ Michel P , et al . Contact motion on surface of asteroid
Journal of Spacecraft and Rockets 2014 , 51 (6 ):1857 -1871
DOI
URL
[本文引用: 1]
[15]
Van Wal S Reid RG Scheeres DJ . Simulation of nonspherical asteroid landers: contact modeling and shape effects on bouncing
Journal of Spacecraft and Rockets 2020 , 57 (1 ):109 -130
DOI
URL
[本文引用: 1]
[16]
Hockman BJ Frick A Reid RG , et al . Design, control, and experimentation of internally-actuated rovers for the exploration of low-gravity planetary bodies
Journal of Field Robotics 2017 , 34 (1 ):5 -24
DOI
URL
[本文引用: 1]
[17]
Liu Y Zhu S Cui P , et al . Hopping trajectory optimization for surface exploration on small bodies
Advances in Space Research 2017 , 60 (1 ):90 -102
DOI
URL
[本文引用: 1]
[18]
Zhang Y Zeng X Circi C , et al . The motion of surface particles for the asteroid 101955 Bennu
Acta Astronautica 2019 , 163 :3 -10
DOI
URL
[本文引用: 2]
[19]
Zhang Y Li J Zeng X . The dynamical environments analysis of surface particles for different shaped asteroids
Advances in Space Research 2021 , 60 (10 ):3328 -3342
[本文引用: 3]
[20]
Ostro SJ Margot JL Benner LAM , et al . Radar imaging of binary near-Earth asteroid (66391) 1999 KW4
Science 2006 , 314 (5803 ):1276 -1280
DOI
URL
[本文引用: 1]
[21]
Yu Y Baoyin H . Modeling of migrating grains on asteroid's surface
Astrophysics and Space Science 2015 , 355 (1 ):43 -56
DOI
URL
[本文引用: 1]
[22]
Li X Scheeres DJ . The shape and surface environment of 2016 HO3
Icarus 2021 , 357 (1 ):114249
DOI
URL
[本文引用: 2]
[23]
Strang PG . A simple mesh generator in MATLAB
Siam Review 2004 , 46 (2 ):329 -345
DOI
URL
[本文引用: 1]
[24]
Watanabe S Hirabayashi M Hirata N , et al . Hayabusa 2 arrives at the carbonaceous asteroid 162173 Ryugu--a spinning top-shaped rubble pile
Science 2019 , 364 (6437 ):268 -272
DOI
PMID
[本文引用: 1]
The Hayabusa2 spacecraft arrived at the near-Earth carbonaceous asteroid 162173 Ryugu in 2018. We present Hayabusa2 observations of Ryugu's shape, mass, and geomorphology. Ryugu has an oblate "spinning top" shape, with a prominent circular equatorial ridge. Its bulk density, 1.19 ± 0.02 grams per cubic centimeter, indicates a high-porosity (>50%) interior. Large surface boulders suggest a rubble-pile structure. Surface slope analysis shows Ryugu's shape may have been produced from having once spun at twice the current rate. Coupled with the observed global material homogeneity, this suggests that Ryugu was reshaped by centrifugally induced deformation during a period of rapid rotation. From these remote-sensing investigations, we identified a suitable sample collection site on the equatorial ridge.Copyright © 2019 The Authors, some rights reserved; exclusive licensee American Association for the Advancement of Science. No claim to original U.S. Government Works.
[25]
Williams DR . Asteroid fact sheet
NASA Goddard Space Flight Center . https://nssdc.gsfc.nasa.gov/planetary/factsheet/asteroidfact.html ./ [Accessed 26 December 2019]
URL
[本文引用: 1]
[26]
Wang W Mengali G Quarta AA , et al . Time-optimal formation establishment around a slowly rotating asteroid
Journal of Guidance, Control, and Dynamics 2020 (10 ):1 -9
[本文引用: 1]
Spin-driven evolution of asteroids' top-shapes at fast and slow spins seen from (101955) Bennu and (162173) Ryugu
1
2020
... 小行星被称作太阳系中的"活化石",其研究对于揭示太阳系起源、行星演化、生命起源等具有重要意义.此外,小行星防御又是一件关乎整个地球命运的事情.因此,随着航天技术的发展,小行星逐渐成为天文学研究和深空探测领域的热点话题之一.近年来,两个小行星采样返回任务:日本的隼鸟2号(Hayabusa 2)和美国的欧西里斯(OSIRIS-REx)任务都极大地吸引了人们的目光[1 ] .而且,隼鸟2号已经从小行星162173Ryugu (龙宫)采到样本,并于2020年12月将样品成功送回地球[2 ] .欧西里斯任务也于2020年10月成功从小行星101955 Bennu (贝努)采到足够样本[3 ] .我国目前在小行星探测方面仍处于起步阶段,对小行星的探测仅仅限于2012年12月,嫦娥2号利用剩余燃料对小行星4179 Toutatis (图塔蒂斯)进行的飞越探测[4 ] .2019年4月,国家航天局正式宣布我国的第一个小行星探测任务,拟计划先对近地小行星2016 HO3进行采样返回,再去探测主带彗星311P[5 ] ,这一任务很可能被命名为``郑和号''[6 ] .这一任务将是人类历史上第一次对十米级小行星的探测以及采样返回,也是人类首次对地球准卫星(小行星2016 HO3同时是一颗地球准卫星)和主带彗星的探测,因此面临史无前例的挑战. ...
2
... 小行星被称作太阳系中的"活化石",其研究对于揭示太阳系起源、行星演化、生命起源等具有重要意义.此外,小行星防御又是一件关乎整个地球命运的事情.因此,随着航天技术的发展,小行星逐渐成为天文学研究和深空探测领域的热点话题之一.近年来,两个小行星采样返回任务:日本的隼鸟2号(Hayabusa 2)和美国的欧西里斯(OSIRIS-REx)任务都极大地吸引了人们的目光[1 ] .而且,隼鸟2号已经从小行星162173Ryugu (龙宫)采到样本,并于2020年12月将样品成功送回地球[2 ] .欧西里斯任务也于2020年10月成功从小行星101955 Bennu (贝努)采到足够样本[3 ] .我国目前在小行星探测方面仍处于起步阶段,对小行星的探测仅仅限于2012年12月,嫦娥2号利用剩余燃料对小行星4179 Toutatis (图塔蒂斯)进行的飞越探测[4 ] .2019年4月,国家航天局正式宣布我国的第一个小行星探测任务,拟计划先对近地小行星2016 HO3进行采样返回,再去探测主带彗星311P[5 ] ,这一任务很可能被命名为``郑和号''[6 ] .这一任务将是人类历史上第一次对十米级小行星的探测以及采样返回,也是人类首次对地球准卫星(小行星2016 HO3同时是一颗地球准卫星)和主带彗星的探测,因此面临史无前例的挑战. ...
... (2) 由于小行星2016 HO3表面存在大片可自发起飞区域,其表面不太可能为碎石堆结构或风化层,而一定具有较强结构力,且有可能是一块完整的石块.因此,其他3个小行星采样任务中所用采样装置很可能并不适用于对小行星2016 HO3进行采样.具体而言,无论是隼鸟号及隼鸟2号通过子弹撞击溅起采样物的方式[2 ,26 ] 还是欧西里斯号通过喷出压缩氮气扬起采样物的方式[3 ] ,都只适用于碎石堆地形或风化层地形等样品颗粒较小且结构力较小的采样标,对于具有较强结构力的2016 HO3并不容易获得足够样品.为此,我国需要对采样装置进行自主创新设计,这无疑是小行星采样任务中的又一关键难点与挑战. ...
2
... 小行星被称作太阳系中的"活化石",其研究对于揭示太阳系起源、行星演化、生命起源等具有重要意义.此外,小行星防御又是一件关乎整个地球命运的事情.因此,随着航天技术的发展,小行星逐渐成为天文学研究和深空探测领域的热点话题之一.近年来,两个小行星采样返回任务:日本的隼鸟2号(Hayabusa 2)和美国的欧西里斯(OSIRIS-REx)任务都极大地吸引了人们的目光[1 ] .而且,隼鸟2号已经从小行星162173Ryugu (龙宫)采到样本,并于2020年12月将样品成功送回地球[2 ] .欧西里斯任务也于2020年10月成功从小行星101955 Bennu (贝努)采到足够样本[3 ] .我国目前在小行星探测方面仍处于起步阶段,对小行星的探测仅仅限于2012年12月,嫦娥2号利用剩余燃料对小行星4179 Toutatis (图塔蒂斯)进行的飞越探测[4 ] .2019年4月,国家航天局正式宣布我国的第一个小行星探测任务,拟计划先对近地小行星2016 HO3进行采样返回,再去探测主带彗星311P[5 ] ,这一任务很可能被命名为``郑和号''[6 ] .这一任务将是人类历史上第一次对十米级小行星的探测以及采样返回,也是人类首次对地球准卫星(小行星2016 HO3同时是一颗地球准卫星)和主带彗星的探测,因此面临史无前例的挑战. ...
... (2) 由于小行星2016 HO3表面存在大片可自发起飞区域,其表面不太可能为碎石堆结构或风化层,而一定具有较强结构力,且有可能是一块完整的石块.因此,其他3个小行星采样任务中所用采样装置很可能并不适用于对小行星2016 HO3进行采样.具体而言,无论是隼鸟号及隼鸟2号通过子弹撞击溅起采样物的方式[2 ,26 ] 还是欧西里斯号通过喷出压缩氮气扬起采样物的方式[3 ] ,都只适用于碎石堆地形或风化层地形等样品颗粒较小且结构力较小的采样标,对于具有较强结构力的2016 HO3并不容易获得足够样品.为此,我国需要对采样装置进行自主创新设计,这无疑是小行星采样任务中的又一关键难点与挑战. ...
小行星的奇特动力学
1
2016
... 小行星被称作太阳系中的"活化石",其研究对于揭示太阳系起源、行星演化、生命起源等具有重要意义.此外,小行星防御又是一件关乎整个地球命运的事情.因此,随着航天技术的发展,小行星逐渐成为天文学研究和深空探测领域的热点话题之一.近年来,两个小行星采样返回任务:日本的隼鸟2号(Hayabusa 2)和美国的欧西里斯(OSIRIS-REx)任务都极大地吸引了人们的目光[1 ] .而且,隼鸟2号已经从小行星162173Ryugu (龙宫)采到样本,并于2020年12月将样品成功送回地球[2 ] .欧西里斯任务也于2020年10月成功从小行星101955 Bennu (贝努)采到足够样本[3 ] .我国目前在小行星探测方面仍处于起步阶段,对小行星的探测仅仅限于2012年12月,嫦娥2号利用剩余燃料对小行星4179 Toutatis (图塔蒂斯)进行的飞越探测[4 ] .2019年4月,国家航天局正式宣布我国的第一个小行星探测任务,拟计划先对近地小行星2016 HO3进行采样返回,再去探测主带彗星311P[5 ] ,这一任务很可能被命名为``郑和号''[6 ] .这一任务将是人类历史上第一次对十米级小行星的探测以及采样返回,也是人类首次对地球准卫星(小行星2016 HO3同时是一颗地球准卫星)和主带彗星的探测,因此面临史无前例的挑战. ...
小行星的奇特动力学
1
2016
... 小行星被称作太阳系中的"活化石",其研究对于揭示太阳系起源、行星演化、生命起源等具有重要意义.此外,小行星防御又是一件关乎整个地球命运的事情.因此,随着航天技术的发展,小行星逐渐成为天文学研究和深空探测领域的热点话题之一.近年来,两个小行星采样返回任务:日本的隼鸟2号(Hayabusa 2)和美国的欧西里斯(OSIRIS-REx)任务都极大地吸引了人们的目光[1 ] .而且,隼鸟2号已经从小行星162173Ryugu (龙宫)采到样本,并于2020年12月将样品成功送回地球[2 ] .欧西里斯任务也于2020年10月成功从小行星101955 Bennu (贝努)采到足够样本[3 ] .我国目前在小行星探测方面仍处于起步阶段,对小行星的探测仅仅限于2012年12月,嫦娥2号利用剩余燃料对小行星4179 Toutatis (图塔蒂斯)进行的飞越探测[4 ] .2019年4月,国家航天局正式宣布我国的第一个小行星探测任务,拟计划先对近地小行星2016 HO3进行采样返回,再去探测主带彗星311P[5 ] ,这一任务很可能被命名为``郑和号''[6 ] .这一任务将是人类历史上第一次对十米级小行星的探测以及采样返回,也是人类首次对地球准卫星(小行星2016 HO3同时是一颗地球准卫星)和主带彗星的探测,因此面临史无前例的挑战. ...
1
... 小行星被称作太阳系中的"活化石",其研究对于揭示太阳系起源、行星演化、生命起源等具有重要意义.此外,小行星防御又是一件关乎整个地球命运的事情.因此,随着航天技术的发展,小行星逐渐成为天文学研究和深空探测领域的热点话题之一.近年来,两个小行星采样返回任务:日本的隼鸟2号(Hayabusa 2)和美国的欧西里斯(OSIRIS-REx)任务都极大地吸引了人们的目光[1 ] .而且,隼鸟2号已经从小行星162173Ryugu (龙宫)采到样本,并于2020年12月将样品成功送回地球[2 ] .欧西里斯任务也于2020年10月成功从小行星101955 Bennu (贝努)采到足够样本[3 ] .我国目前在小行星探测方面仍处于起步阶段,对小行星的探测仅仅限于2012年12月,嫦娥2号利用剩余燃料对小行星4179 Toutatis (图塔蒂斯)进行的飞越探测[4 ] .2019年4月,国家航天局正式宣布我国的第一个小行星探测任务,拟计划先对近地小行星2016 HO3进行采样返回,再去探测主带彗星311P[5 ] ,这一任务很可能被命名为``郑和号''[6 ] .这一任务将是人类历史上第一次对十米级小行星的探测以及采样返回,也是人类首次对地球准卫星(小行星2016 HO3同时是一颗地球准卫星)和主带彗星的探测,因此面临史无前例的挑战. ...
ZhengHe--a mission to a near-Earth asteroid and a main belt comet
1
... 小行星被称作太阳系中的"活化石",其研究对于揭示太阳系起源、行星演化、生命起源等具有重要意义.此外,小行星防御又是一件关乎整个地球命运的事情.因此,随着航天技术的发展,小行星逐渐成为天文学研究和深空探测领域的热点话题之一.近年来,两个小行星采样返回任务:日本的隼鸟2号(Hayabusa 2)和美国的欧西里斯(OSIRIS-REx)任务都极大地吸引了人们的目光[1 ] .而且,隼鸟2号已经从小行星162173Ryugu (龙宫)采到样本,并于2020年12月将样品成功送回地球[2 ] .欧西里斯任务也于2020年10月成功从小行星101955 Bennu (贝努)采到足够样本[3 ] .我国目前在小行星探测方面仍处于起步阶段,对小行星的探测仅仅限于2012年12月,嫦娥2号利用剩余燃料对小行星4179 Toutatis (图塔蒂斯)进行的飞越探测[4 ] .2019年4月,国家航天局正式宣布我国的第一个小行星探测任务,拟计划先对近地小行星2016 HO3进行采样返回,再去探测主带彗星311P[5 ] ,这一任务很可能被命名为``郑和号''[6 ] .这一任务将是人类历史上第一次对十米级小行星的探测以及采样返回,也是人类首次对地球准卫星(小行星2016 HO3同时是一颗地球准卫星)和主带彗星的探测,因此面临史无前例的挑战. ...
Asteroid hovering missions from a fuel-consumption viewpoint
1
2020
... 与大天体不同,小行星体积较小且外形不规则,因此,小行星引力场并不规则且较为微弱.同时,小行星不规则的外形也导致了小行星地形的复杂性,再加上小行星的快速自旋[7 -8 ] ,使得小行星表面动力学成为一个世界性难题.然而小行星表面动力学又在一些小行星探测任务中扮演着重要角色[9 ] ,例如:着陆位置及采样点的选择,着陆器、表面巡视器以及标记球的部署与控制等均需要对小行星表面动力学进行研究.此外,小行星表面动力学的研究对于小行星地表演化过程的揭示也具有重要意义[10 -11 ] . ...
Study on periodic orbits around the dipole segment model for dumbbell-shaped asteroids
1
2018
... 与大天体不同,小行星体积较小且外形不规则,因此,小行星引力场并不规则且较为微弱.同时,小行星不规则的外形也导致了小行星地形的复杂性,再加上小行星的快速自旋[7 -8 ] ,使得小行星表面动力学成为一个世界性难题.然而小行星表面动力学又在一些小行星探测任务中扮演着重要角色[9 ] ,例如:着陆位置及采样点的选择,着陆器、表面巡视器以及标记球的部署与控制等均需要对小行星表面动力学进行研究.此外,小行星表面动力学的研究对于小行星地表演化过程的揭示也具有重要意义[10 -11 ] . ...
Modeling and analysis of Hayabusa 2 touchdown
1
2020
... 与大天体不同,小行星体积较小且外形不规则,因此,小行星引力场并不规则且较为微弱.同时,小行星不规则的外形也导致了小行星地形的复杂性,再加上小行星的快速自旋[7 -8 ] ,使得小行星表面动力学成为一个世界性难题.然而小行星表面动力学又在一些小行星探测任务中扮演着重要角色[9 ] ,例如:着陆位置及采样点的选择,着陆器、表面巡视器以及标记球的部署与控制等均需要对小行星表面动力学进行研究.此外,小行星表面动力学的研究对于小行星地表演化过程的揭示也具有重要意义[10 -11 ] . ...
Numerical predictions of surface effects during the 2029 close approach of asteroid 99942 Apophis
1
2014
... 与大天体不同,小行星体积较小且外形不规则,因此,小行星引力场并不规则且较为微弱.同时,小行星不规则的外形也导致了小行星地形的复杂性,再加上小行星的快速自旋[7 -8 ] ,使得小行星表面动力学成为一个世界性难题.然而小行星表面动力学又在一些小行星探测任务中扮演着重要角色[9 ] ,例如:着陆位置及采样点的选择,着陆器、表面巡视器以及标记球的部署与控制等均需要对小行星表面动力学进行研究.此外,小行星表面动力学的研究对于小行星地表演化过程的揭示也具有重要意义[10 -11 ] . ...
The dynamical complexity of surface mass shedding from a top-shaped asteroid near the critical spin limit
1
2018
... 与大天体不同,小行星体积较小且外形不规则,因此,小行星引力场并不规则且较为微弱.同时,小行星不规则的外形也导致了小行星地形的复杂性,再加上小行星的快速自旋[7 -8 ] ,使得小行星表面动力学成为一个世界性难题.然而小行星表面动力学又在一些小行星探测任务中扮演着重要角色[9 ] ,例如:着陆位置及采样点的选择,着陆器、表面巡视器以及标记球的部署与控制等均需要对小行星表面动力学进行研究.此外,小行星表面动力学的研究对于小行星地表演化过程的揭示也具有重要意义[10 -11 ] . ...
Development of a target marker for landing on asteroids
1
2001
... 对于小行星表面动力学这一问题,前人的研究多集中于物体在小行星表面运动轨迹的计算.Sawai等[12 ] 最先对此类问题进行了研究,研究了质点在旋转椭球体表面的运动,Liu等[13 ] 则研究了质点在均质旋转立方体表面的运动.Tardivel等[14 ] 将质点运动改进为球形舱的运动,此后,Van Wal等[15 ] 进一步进行了改进,使其可以对任意形状物体在小行星表面自由运动轨迹进行计算.Hockman等[16 ] 使用简化动力学模型对小行星表面弹跳运动进行规划.Liu等[17 ] 则对小行星表面弹跳轨迹进行优化.Zhang等[18 ] 通过数值仿真计算得出小行星Bennu表面物体具有趋向其赤道附近区域运动趋势,并揭示其动力学机理.实际上,小行星表面物体运动十分复杂,对其运动轨迹进行精确仿真并不现实.因此,对小行星表面动力学环境进行分析,如表面物体运动趋势的分析及自发运动行为的判断等不失为研究小行星表面物体运动规律的一种可行方法.Zhang等[19 ] 对近球形、纺锤形、哑铃形三类小行星在不同参数下进行了表面动力学环境分析,并给出一般性结论. ...
Dynamics of surface motion on a rotating massive homogeneous body
1
2013
... 对于小行星表面动力学这一问题,前人的研究多集中于物体在小行星表面运动轨迹的计算.Sawai等[12 ] 最先对此类问题进行了研究,研究了质点在旋转椭球体表面的运动,Liu等[13 ] 则研究了质点在均质旋转立方体表面的运动.Tardivel等[14 ] 将质点运动改进为球形舱的运动,此后,Van Wal等[15 ] 进一步进行了改进,使其可以对任意形状物体在小行星表面自由运动轨迹进行计算.Hockman等[16 ] 使用简化动力学模型对小行星表面弹跳运动进行规划.Liu等[17 ] 则对小行星表面弹跳轨迹进行优化.Zhang等[18 ] 通过数值仿真计算得出小行星Bennu表面物体具有趋向其赤道附近区域运动趋势,并揭示其动力学机理.实际上,小行星表面物体运动十分复杂,对其运动轨迹进行精确仿真并不现实.因此,对小行星表面动力学环境进行分析,如表面物体运动趋势的分析及自发运动行为的判断等不失为研究小行星表面物体运动规律的一种可行方法.Zhang等[19 ] 对近球形、纺锤形、哑铃形三类小行星在不同参数下进行了表面动力学环境分析,并给出一般性结论. ...
Contact motion on surface of asteroid
1
2014
... 对于小行星表面动力学这一问题,前人的研究多集中于物体在小行星表面运动轨迹的计算.Sawai等[12 ] 最先对此类问题进行了研究,研究了质点在旋转椭球体表面的运动,Liu等[13 ] 则研究了质点在均质旋转立方体表面的运动.Tardivel等[14 ] 将质点运动改进为球形舱的运动,此后,Van Wal等[15 ] 进一步进行了改进,使其可以对任意形状物体在小行星表面自由运动轨迹进行计算.Hockman等[16 ] 使用简化动力学模型对小行星表面弹跳运动进行规划.Liu等[17 ] 则对小行星表面弹跳轨迹进行优化.Zhang等[18 ] 通过数值仿真计算得出小行星Bennu表面物体具有趋向其赤道附近区域运动趋势,并揭示其动力学机理.实际上,小行星表面物体运动十分复杂,对其运动轨迹进行精确仿真并不现实.因此,对小行星表面动力学环境进行分析,如表面物体运动趋势的分析及自发运动行为的判断等不失为研究小行星表面物体运动规律的一种可行方法.Zhang等[19 ] 对近球形、纺锤形、哑铃形三类小行星在不同参数下进行了表面动力学环境分析,并给出一般性结论. ...
Simulation of nonspherical asteroid landers: contact modeling and shape effects on bouncing
1
2020
... 对于小行星表面动力学这一问题,前人的研究多集中于物体在小行星表面运动轨迹的计算.Sawai等[12 ] 最先对此类问题进行了研究,研究了质点在旋转椭球体表面的运动,Liu等[13 ] 则研究了质点在均质旋转立方体表面的运动.Tardivel等[14 ] 将质点运动改进为球形舱的运动,此后,Van Wal等[15 ] 进一步进行了改进,使其可以对任意形状物体在小行星表面自由运动轨迹进行计算.Hockman等[16 ] 使用简化动力学模型对小行星表面弹跳运动进行规划.Liu等[17 ] 则对小行星表面弹跳轨迹进行优化.Zhang等[18 ] 通过数值仿真计算得出小行星Bennu表面物体具有趋向其赤道附近区域运动趋势,并揭示其动力学机理.实际上,小行星表面物体运动十分复杂,对其运动轨迹进行精确仿真并不现实.因此,对小行星表面动力学环境进行分析,如表面物体运动趋势的分析及自发运动行为的判断等不失为研究小行星表面物体运动规律的一种可行方法.Zhang等[19 ] 对近球形、纺锤形、哑铃形三类小行星在不同参数下进行了表面动力学环境分析,并给出一般性结论. ...
Design, control, and experimentation of internally-actuated rovers for the exploration of low-gravity planetary bodies
1
2017
... 对于小行星表面动力学这一问题,前人的研究多集中于物体在小行星表面运动轨迹的计算.Sawai等[12 ] 最先对此类问题进行了研究,研究了质点在旋转椭球体表面的运动,Liu等[13 ] 则研究了质点在均质旋转立方体表面的运动.Tardivel等[14 ] 将质点运动改进为球形舱的运动,此后,Van Wal等[15 ] 进一步进行了改进,使其可以对任意形状物体在小行星表面自由运动轨迹进行计算.Hockman等[16 ] 使用简化动力学模型对小行星表面弹跳运动进行规划.Liu等[17 ] 则对小行星表面弹跳轨迹进行优化.Zhang等[18 ] 通过数值仿真计算得出小行星Bennu表面物体具有趋向其赤道附近区域运动趋势,并揭示其动力学机理.实际上,小行星表面物体运动十分复杂,对其运动轨迹进行精确仿真并不现实.因此,对小行星表面动力学环境进行分析,如表面物体运动趋势的分析及自发运动行为的判断等不失为研究小行星表面物体运动规律的一种可行方法.Zhang等[19 ] 对近球形、纺锤形、哑铃形三类小行星在不同参数下进行了表面动力学环境分析,并给出一般性结论. ...
Hopping trajectory optimization for surface exploration on small bodies
1
2017
... 对于小行星表面动力学这一问题,前人的研究多集中于物体在小行星表面运动轨迹的计算.Sawai等[12 ] 最先对此类问题进行了研究,研究了质点在旋转椭球体表面的运动,Liu等[13 ] 则研究了质点在均质旋转立方体表面的运动.Tardivel等[14 ] 将质点运动改进为球形舱的运动,此后,Van Wal等[15 ] 进一步进行了改进,使其可以对任意形状物体在小行星表面自由运动轨迹进行计算.Hockman等[16 ] 使用简化动力学模型对小行星表面弹跳运动进行规划.Liu等[17 ] 则对小行星表面弹跳轨迹进行优化.Zhang等[18 ] 通过数值仿真计算得出小行星Bennu表面物体具有趋向其赤道附近区域运动趋势,并揭示其动力学机理.实际上,小行星表面物体运动十分复杂,对其运动轨迹进行精确仿真并不现实.因此,对小行星表面动力学环境进行分析,如表面物体运动趋势的分析及自发运动行为的判断等不失为研究小行星表面物体运动规律的一种可行方法.Zhang等[19 ] 对近球形、纺锤形、哑铃形三类小行星在不同参数下进行了表面动力学环境分析,并给出一般性结论. ...
The motion of surface particles for the asteroid 101955 Bennu
2
2019
... 对于小行星表面动力学这一问题,前人的研究多集中于物体在小行星表面运动轨迹的计算.Sawai等[12 ] 最先对此类问题进行了研究,研究了质点在旋转椭球体表面的运动,Liu等[13 ] 则研究了质点在均质旋转立方体表面的运动.Tardivel等[14 ] 将质点运动改进为球形舱的运动,此后,Van Wal等[15 ] 进一步进行了改进,使其可以对任意形状物体在小行星表面自由运动轨迹进行计算.Hockman等[16 ] 使用简化动力学模型对小行星表面弹跳运动进行规划.Liu等[17 ] 则对小行星表面弹跳轨迹进行优化.Zhang等[18 ] 通过数值仿真计算得出小行星Bennu表面物体具有趋向其赤道附近区域运动趋势,并揭示其动力学机理.实际上,小行星表面物体运动十分复杂,对其运动轨迹进行精确仿真并不现实.因此,对小行星表面动力学环境进行分析,如表面物体运动趋势的分析及自发运动行为的判断等不失为研究小行星表面物体运动规律的一种可行方法.Zhang等[19 ] 对近球形、纺锤形、哑铃形三类小行星在不同参数下进行了表面动力学环境分析,并给出一般性结论. ...
... 物体在小行星表面自由运动趋势取决于小行星表面有效势分布,物体具有从有效势高的位置向有效势低的位置运动的趋势[18 -20 ] .在对小行星表面物体运动进行研究时,通常利用多面体模型对小行星进行建模.Yu等[21 ] 给出可用于小行星表面的多面体模型引力势及其梯度计算公式分别为 ...
The dynamical environments analysis of surface particles for different shaped asteroids
3
2021
... 对于小行星表面动力学这一问题,前人的研究多集中于物体在小行星表面运动轨迹的计算.Sawai等[12 ] 最先对此类问题进行了研究,研究了质点在旋转椭球体表面的运动,Liu等[13 ] 则研究了质点在均质旋转立方体表面的运动.Tardivel等[14 ] 将质点运动改进为球形舱的运动,此后,Van Wal等[15 ] 进一步进行了改进,使其可以对任意形状物体在小行星表面自由运动轨迹进行计算.Hockman等[16 ] 使用简化动力学模型对小行星表面弹跳运动进行规划.Liu等[17 ] 则对小行星表面弹跳轨迹进行优化.Zhang等[18 ] 通过数值仿真计算得出小行星Bennu表面物体具有趋向其赤道附近区域运动趋势,并揭示其动力学机理.实际上,小行星表面物体运动十分复杂,对其运动轨迹进行精确仿真并不现实.因此,对小行星表面动力学环境进行分析,如表面物体运动趋势的分析及自发运动行为的判断等不失为研究小行星表面物体运动规律的一种可行方法.Zhang等[19 ] 对近球形、纺锤形、哑铃形三类小行星在不同参数下进行了表面动力学环境分析,并给出一般性结论. ...
... 由此可得小行星附近任意一点处有效势大小.根据小行星表面有效势大小分布,即可判断小行星表面物体自由运动趋势[19 ] . ...
... 由于与接触面实际粗糙程度无关,临界摩擦系数$\mu_c$还可以用来定量地描述物体自发滑动的难易程度.在接触面实际粗糙程度相同的前提下,临界摩擦系数$\mu_c$越小的位置,物体越不容易产生自发滑动;反之,如果临界摩擦系数很大,实际中静摩擦系数几乎不可能达到临界摩擦系数的值,则可以认为大多数材质的物体在此位置都一定会发生自发滑动现象[19 ] . ...
Radar imaging of binary near-Earth asteroid (66391) 1999 KW4
1
2006
... 物体在小行星表面自由运动趋势取决于小行星表面有效势分布,物体具有从有效势高的位置向有效势低的位置运动的趋势[18 -20 ] .在对小行星表面物体运动进行研究时,通常利用多面体模型对小行星进行建模.Yu等[21 ] 给出可用于小行星表面的多面体模型引力势及其梯度计算公式分别为 ...
Modeling of migrating grains on asteroid's surface
1
2015
... 物体在小行星表面自由运动趋势取决于小行星表面有效势分布,物体具有从有效势高的位置向有效势低的位置运动的趋势[18 -20 ] .在对小行星表面物体运动进行研究时,通常利用多面体模型对小行星进行建模.Yu等[21 ] 给出可用于小行星表面的多面体模型引力势及其梯度计算公式分别为 ...
The shape and surface environment of 2016 HO3
2
2021
... 小行星2016 HO3目前暂没有公开的多面体数据,无法直接应用第1节中公式进行计算分析.本文为对其表面动力学环境进行粗略研究,先根据Li等[22 ] 给出的数据,将2016 HO3建模为58.8 m $\times$ 28.2 m $\times$ 28.2 m的三轴椭球,其自转周期为0.467 h,等效半径为18.0 m,密度为2 700 kg/m$^{3}$.以三轴椭球质心为坐标原点,长轴作为$x$轴,由于椭球另外两轴半径相同,任取一通过坐标原点且垂直$x$轴方向作为$z$轴正方向,并假设小行星自转角速度方向与该方向重合,再选取$y$轴使其构成右手直角坐标系.之后利用开源网格划分程序distmesh[23 ] 将小行星2016 HO3的椭球模型划分为具有6470个顶点,12 936个面的多面体,至此,可以使用第1节中公式对2016 HO3进行计算分析.此处虽可以不进行多面体网格划分,直接使用椭球模型对小行星2016 HO3进行研究,但为了表明方法对于任意外形小行星的通用性,仍对小行星2016 HO3的椭球模型进行多面体网格划分后再进行研究分析. ...
... 采样返回任务目标小行星参数[22 ,24 -25 ] ...
A simple mesh generator in MATLAB
1
2004
... 小行星2016 HO3目前暂没有公开的多面体数据,无法直接应用第1节中公式进行计算分析.本文为对其表面动力学环境进行粗略研究,先根据Li等[22 ] 给出的数据,将2016 HO3建模为58.8 m $\times$ 28.2 m $\times$ 28.2 m的三轴椭球,其自转周期为0.467 h,等效半径为18.0 m,密度为2 700 kg/m$^{3}$.以三轴椭球质心为坐标原点,长轴作为$x$轴,由于椭球另外两轴半径相同,任取一通过坐标原点且垂直$x$轴方向作为$z$轴正方向,并假设小行星自转角速度方向与该方向重合,再选取$y$轴使其构成右手直角坐标系.之后利用开源网格划分程序distmesh[23 ] 将小行星2016 HO3的椭球模型划分为具有6470个顶点,12 936个面的多面体,至此,可以使用第1节中公式对2016 HO3进行计算分析.此处虽可以不进行多面体网格划分,直接使用椭球模型对小行星2016 HO3进行研究,但为了表明方法对于任意外形小行星的通用性,仍对小行星2016 HO3的椭球模型进行多面体网格划分后再进行研究分析. ...
Hayabusa 2 arrives at the carbonaceous asteroid 162173 Ryugu--a spinning top-shaped rubble pile
1
2019
... 采样返回任务目标小行星参数[22 ,24 -25 ] ...
Asteroid fact sheet
1
... 采样返回任务目标小行星参数[22 ,24 -25 ] ...
Time-optimal formation establishment around a slowly rotating asteroid
1
2020
... (2) 由于小行星2016 HO3表面存在大片可自发起飞区域,其表面不太可能为碎石堆结构或风化层,而一定具有较强结构力,且有可能是一块完整的石块.因此,其他3个小行星采样任务中所用采样装置很可能并不适用于对小行星2016 HO3进行采样.具体而言,无论是隼鸟号及隼鸟2号通过子弹撞击溅起采样物的方式[2 ,26 ] 还是欧西里斯号通过喷出压缩氮气扬起采样物的方式[3 ] ,都只适用于碎石堆地形或风化层地形等样品颗粒较小且结构力较小的采样标,对于具有较强结构力的2016 HO3并不容易获得足够样品.为此,我国需要对采样装置进行自主创新设计,这无疑是小行星采样任务中的又一关键难点与挑战. ...





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}