双稳态复合材料层合板壳结构包括非对称、反对称等类型,具备较强的承载、变形能力和良好的轻质性,正日益成为航空航天领域关注的研究对象。在残余应力和几何非线性共同作用下,非对称铺设的复合材料层合板在固化之后会产生两个稳定的平衡构型和一个不稳定的平衡构型,从而形成了双稳态复合材料层合板。两个稳定平衡构型不需要持续的能量输入就能被维持并且在输入特定能量的情况下可以通过跳跃(snap-through)实现互相转换。本文以六层非对称正交双稳态复合材料层合板为研究对象,分析了双稳态复合材料层合板在动态激励作用下发生的周期振动、概周期振动、混沌振动和动态跳跃现象。
双稳态板壳结构有望被应用于减振器[1 -2 ] 、飞行器[3 ] 和能量采集器[4 ] 等。Cantera等[5 ] 通过在四个角处施加垂直机械力研究了双稳态板的静态跳跃过程。Vogl等[6 ] 利用瑞利李兹技术和哈密顿原理研究了非对称正交双稳态复合材料层合板的自由振动问题。Arrieta等[7 ] 建立了非对称双稳态复合材料层合板的单稳态低阶非线性动力学模型。Taki等[8 ] 利用瑞利李兹技术和哈密顿原理建立了表面铺设压电层的非对称正交双稳态复合材料层合板的动力学模型。Bilgen等[9 ] 详细研究了双稳态翼形复合材料层合板的气动响应。Arrieta等[10 ] 对非对称机翼状双稳态复合材料层合板的动态响应和气动特性进行了理论和实验研究。Zhang等[11 -12 ] 研究了非对称正交双稳态复合材料层合板在基础激励作用下的动态跳跃现象、非线性振动、双激励多稳定性、Shilnikov型多脉冲跳跃混沌振动及亚稳态混沌振动。
目前有关双稳态板动态跳跃的研究主要以实验研究为主,而针对双稳态板的理论研究基本都是围绕某一个稳定平衡状态的局部动力学研究。本文通过理论建模的方式研究了六层非对称正交双稳态复合材料层合板的动态跳跃和非线性振动。
1 动力学模型
本文的研究对象为六层非对称正交双稳态复合材料层合板,如图1 所示。边界条件为中心固支和四边自由,如图1 (a)所示。双稳态复合材料层合板的两个稳定的平衡状态如图1 (b)所示。铺设顺序为非对称铺设顺序(0/0/0/90/90/90),即前三层纤维的铺设角度$\theta=0^\circ$,后三层纤维的铺设角度$\theta =90^\circ$,如图1 (c)所示。在板的中心处建立直角坐标系$oxyz$。板的几何尺寸长、宽和厚度分别为$2L_{x}$,$2L_{y}$和2$H$。每层纤维的厚度为$h$。作用在支撑杆件上的基础激励为$Y$。
图1
图1
双稳态复合材料层合板模型
Fig.1
The model of the bistable composite laminated plate
根据Reddy三阶剪切变形板理论,非对称正交双稳态复合材料层合板的位移场可以写成
(1a) $\begin{array}{c}u(x, y, z, t)=u_{0}(x, y, t)+z \phi_{x}(x, y, t)- \\c_{1} z^{3}\left(\phi_{x}+\frac{\partial w}{\partial x}\right)\end{array}$
(1b) $\begin{array}{c}v(x, y, z, t)=v_{0}(x, y, t)+z \phi_{y}(x, y, t)- \\c_{1} z^{3}\left(\phi_{y}+\frac{\partial w}{\partial y}\right)\end{array}$
(1c) $w(x, y, t)=w_{0}(x, y, t)+Y$
其中$u_0$, $v_0$和$w_0$分别表示六层非对称双稳态板中面上任意一点沿$x$,$y$和$z$方向的位移,$\phi_{x}$和$\phi_{y}$分别为中面横向法线绕$y$轴和$x$轴的转角。
(2a) $\left.\begin{array}{l}\left\{\begin{array}{c}\varepsilon_{x} \\\varepsilon_{y} \\\gamma_{x y} \\\gamma_{y z} \\\gamma_{x z}\end{array}\right\}=\left\{\begin{array}{c}\varepsilon_{x}^{(0)} \\\varepsilon_{y}^{(0)} \\\gamma_{x y}^{(0)} \\\gamma_{y z}^{(0)} \\\gamma_{x z}^{(0)}\end{array}\right\}+z\left\{\begin{array}{c}k_{x}^{(0)} \\k_{y}^{(0)} \\k_{x y}^{(0)} \\0 \\0\end{array}\right\}+z^{2}\left\{\begin{array}{c}0 \\0 \\0 \\k_{y z}^{(1)} \\k_{x z}^{(1)}\end{array}\right\}+z^{3}\left\{\begin{array}{c}k_{x}^{(2)} \\k_{y}^{(2)} \\k_{x y}^{(2)} \\0 \\0\end{array}\right\} \\\left\{\begin{array}{c}\gamma_{y z}^{(0)} \\\gamma_{x z}^{(0)}\end{array}\right\}=\left\{\begin{array}{l}\phi_{y}+\frac{\partial w}{\partial y} \\\phi_{x}+\frac{\partial w}{\partial x}\end{array}\right\},\left\{\begin{array}{l}k_{y z}^{(1)} \\k_{x z}^{(1)}\end{array}\right\}=-c_{2}\left\{\begin{array}{c}\phi_{y}+\frac{\partial w}{\partial y} \\\phi_{x}+\frac{\partial w}{\partial x}\end{array}\right\}\end{array}\right\}$
(2b) $\left.\begin{array}{c}\left\{\begin{array}{c}\varepsilon_{x}^{(0)} \\\varepsilon_{y}^{(0)} \\\gamma_{x y}^{(0)}\end{array}\right\}=\left\{\begin{array}{c}\frac{\partial u_{0}}{\partial x}+\frac{1}{2}\left(\frac{\partial w_{0}}{\partial x}\right)^{2} \\\frac{\partial v_{0}}{\partial y}+\frac{1}{2}\left(\frac{\partial w_{0}}{\partial y}\right)^{2} \\\frac{\partial v_{0}}{\partial x}+\frac{\partial u_{0}}{\partial y}+\frac{\partial w_{0}}{\partial x} \frac{\partial w_{0}}{\partial y}\end{array}\right\},\left\{\begin{array}{c}k_{x}^{(0)} \\k_{y}^{(0)} \\k_{x y}^{(0)}\end{array}\right\}=\left\{\begin{array}{c}\frac{\partial \phi_{x}}{\partial x} \\\frac{\partial \phi_{y}}{\partial y} \\\frac{\partial \phi_{x}}{\partial y}+\frac{\partial \phi_{y}}{\partial x}\end{array}\right\} \\\left\{\begin{array}{c}k_{x}^{(2)} \\k_{y}^{(2)} \\k_{x y}^{(2)}\end{array}\right\}=-c_{1}\left\{\begin{array}{c}\frac{\partial \phi_{x}}{\partial x}+\frac{\partial^{2} w_{0}}{\partial x^{2}} \\\frac{\partial \phi_{y}}{\partial y}+\frac{\partial^{2} w_{0}}{\partial y^{2}} \\\frac{\partial \phi_{x}}{\partial y}+\frac{\partial \phi_{y}}{\partial x}+2 \frac{\partial^{2} w}{\partial x \partial y}\end{array}\right\}\end{array}\right\}$
$c_{1}=\frac{4}{3(2 H)^{2}},\ \ c_{2}=3 c_{1}$
(3) $\left.\begin{array}{c}\left\{\begin{array}{c}\sigma_{x} \\\sigma_{y} \\\sigma_{y z} \\\sigma_{z x} \\\sigma_{x y}\end{array}\right\}=\left[\begin{array}{ccccc}\bar{Q}_{11} & \bar{Q}_{12} & 0 & 0 & \bar{Q}_{16} \\\bar{Q}_{12} & \bar{Q}_{22} & 0 & 0 & \bar{Q}_{26} \\0 & 0 & \bar{Q}_{44} & \bar{Q}_{45} & 0 \\0 & 0 & \bar{Q}_{45} & \bar{Q}_{55} & 0 \\\bar{Q}_{16} & \bar{Q}_{26} & 0 & 0 & \bar{Q}_{66}\end{array}{ }^{(k)}\right. \\\left(\left\{\begin{array}{c}\varepsilon_{x} \\\varepsilon_{y} \\\gamma_{y z} \\\gamma_{z x} \\\gamma_{x y}\end{array}\right\}-\left\{\begin{array}{c}\alpha_{x x} \\\alpha_{y y} \\0 \\0 \\2 \alpha_{x y}\end{array}\right\} \Delta T\right.\end{array}\right)$
(4) $\left.\begin{array}{rl}\bar{Q}_{11} & =Q_{11} \cos ^{4} \theta+2\left(Q_{12}+2 Q_{66}\right) \sin ^{2} \theta \\& \cos ^{2} \theta+Q_{22} \sin ^{4} \theta \\\bar{Q}_{12} & =\left(Q_{11}+Q_{22}-4 Q_{66}\right) \sin ^{2} \theta \\& \cos ^{2} \theta+Q_{12}\left(\sin ^{4} \theta+\cos ^{4} \theta\right) \\\bar{Q}_{22} & =Q_{11} \sin ^{4} \theta+2\left(Q_{12}+2 Q_{66}\right) \sin ^{2} \theta \\& \cos ^{2} \theta+Q_{22} \cos ^{4} \theta \\\bar{Q}_{16} & =\left(Q_{11}-Q_{12}-2 Q_{66}\right) \sin \theta \cos ^{3} \theta+ \\& \left(Q_{12}-Q_{22}+2 Q_{66}\right) \sin ^{3} \theta \cos \theta \\\bar{Q}_{26} & =\left(Q_{11}-Q_{12}-2 Q_{66}\right) \sin 3 \cos \theta+ \\& \left(Q_{12}-Q_{22}+2 Q_{66}\right) \sin \theta \cos ^{3} \theta \\\bar{Q}_{66} & =\left(Q_{11}+Q_{22}-2 Q_{12}-2 Q_{66}\right) \sin ^{2} \theta \\& \cos ^{2} \theta+Q_{66}\left(\sin 4+\cos ^{4} \theta\right) \\\bar{Q}_{44} & =Q_{44} \cos ^{2} \theta+Q_{55} \sin ^{2} \theta \\\bar{Q}_{55} & =Q_{44} \sin ^{2} \theta+Q_{55} \cos ^{2} \theta \\\bar{Q}_{45} & =\left(Q_{55}-Q_{44}\right) \sin \theta \cos ^{2} \theta \\\bar{\alpha}_{x x} & =\alpha_{x x} \cos ^{2} \theta+\alpha_{y y} \sin ^{2} \theta \\\bar{\alpha}_{y y} & =\alpha_{x x} \sin ^{2} \theta+\alpha_{y y} \cos ^{2} \theta \\\bar{\alpha}_{x y} & =\left(\alpha_{x x}-\alpha_{y y}\right) \sin \theta \cos ^{2} \theta\end{array}\right\}$
其中,$\alpha_{xx}$和$\alpha_{yy}$分别表示双稳态板沿$x$轴和$y$轴的热膨胀系数,$\theta$表示纤维的铺设角度,$Q_{ij}$代表刚度系数,并表示为
(5) $\left.\begin{array}{rl}Q_{11} & =\frac{E_{11}}{1-v_{12} v_{21}}, \quad Q_{22}=\frac{E_{22}}{1-v_{12} v_{21}} \\Q_{12} & =\frac{E_{22} v_{12}}{1-v_{12} v_{21}}, \quad Q_{16}=Q_{26}=0 \\Q_{45} & =0, \quad Q_{44}=Q_{55}=G_{13}, \quad Q_{66}=G_{12}\end{array}\right\}$
其中,$E_{11}$表示纵向弹性模量,$E_{22}$表示横向弹性模量,$v_{12}$和$v_{21}$表示泊松比,$G_{12}$和$G_{13}$表示剪切模量。
根据Hamilton原理,可以得到六层非对称正交双稳态复合材料层合板的非线性偏微分控制方程
(6a) $\begin{array}{c}\frac{\partial N_{x x}}{\partial x}+\frac{\partial N_{x y}}{\partial y}=I_{0} \ddot{u}_{0}+\left(I_{1}+c_{1} I_{3}\right) \ddot{\phi}_{x}- \\c_{1} I_{3} \frac{\partial \ddot{w}}{\partial x}\end{array}$
(6b) $\begin{array}{c}\frac{\partial N_{y y}}{\partial y}+\frac{\partial N_{x y}}{\partial x}=I_{0} \ddot{v}_{0}+\left(I_{1}+c_{1} I_{3}\right) \ddot{\phi}_{y}- \\c_{1} I_{3} \frac{\partial \ddot{w}}{\partial y}\end{array}$
(6c) $\begin{array}{l}\frac{\partial Q_{x}}{\partial x}-c_{2} \frac{\partial R_{x}}{\partial x}+\frac{\partial Q_{y}}{\partial y}-c_{2} \frac{\partial R_{y}}{\partial y}+ \\\quad \frac{\partial}{\partial x}\left(N_{x x} \frac{\partial w_{0}}{\partial x}+N_{x y} \frac{\partial w_{0}}{\partial y}\right)+ \\\frac{\partial}{\partial y}\left(N_{y y} \frac{\partial w_{0}}{\partial y}+N_{x y} \frac{\partial w_{0}}{\partial x}\right)+ \\c_{1}\left(\frac{\partial^{2} P_{x x}}{\partial x^{2}}+2 \frac{\partial^{2} P_{x y}}{\partial x y}+\frac{\partial^{2} P_{y y}}{\partial y^{2}}\right)-c \dot{w}_{0}= \\I_{0} \ddot{w}_{0}-c_{1}^{2} I_{6}\left(\frac{\partial^{2} \ddot{w}_{0}}{\partial x^{2}}+\frac{\partial^{2} \ddot{w}_{0}}{\partial y^{2}}\right)+ \\c_{1} I_{3}\left(\frac{\partial \ddot{u}_{0}}{\partial x}+\frac{\partial \ddot{v}_{0}}{\partial y}\right)+ \\I_{0} \ddot{Y}+c_{1} I_{4}\left(\frac{\partial \ddot{\phi}_{x}}{\partial x}+\frac{\partial \ddot{\phi}_{y}}{\partial y}\right)\end{array}$
(6d) $\begin{aligned}\frac{\partial M_{x x}}{\partial x} &+\frac{\partial M_{x y}}{\partial y}-Q_{x}+c_{2} R_{x}-\\c_{1}\left(\frac{\partial P_{x x}}{\partial x}+\frac{\partial P_{x y}}{\partial y}\right)=\left(I_{1}+c_{1} I_{3}\right) \ddot{u}_{0}+\\&\left(I_{2}-2 c_{1} I_{4}+c_{1}^{2} I_{6}\right) \ddot{\phi}_{x}-\\c_{1}\left(I_{4}+c_{1} I_{6}\right) \frac{\partial \ddot{w}_{0}}{\partial x}\end{aligned}$
(6e) $\begin{array}{l}\frac{\partial M_{y y}}{\partial y}+\frac{\partial M_{x y}}{\partial x}-Q_{y}+c_{2} R_{y}- \\c_{1}\left(\frac{\partial P_{y y}}{\partial y}+\frac{\partial P_{x y}}{\partial x}\right)=\left(I_{1}+c_{1} I_{3}\right) \ddot{v}_{0}+ \\\left(I_{2}-2 c_{1} I_{4}+c_{1}^{2} I_{6}\right) \ddot{\phi}_{y}-c_{1}\left(I_{4}+c_{1} I_{6}\right) \frac{\partial \ddot{w}_{0}}{\partial y}\end{array}$
(7a) $\left\{\begin{array}{c}N \\M \\P\end{array}\right\}=\left[\begin{array}{lll}A & B & E \\B & D & F \\E & F & H\end{array}\right]\left\{\begin{array}{l}\varepsilon^{(0)} \\\varepsilon^{(1)} \\\varepsilon^{(3)}\end{array}\right\}$
(7b) $\left\{\begin{array}{l}Q \\\boldsymbol{R}\end{array}\right\}=\left[\begin{array}{ll}A & D \\D & \boldsymbol{F}\end{array}\right]\left\{\begin{array}{l}\gamma^{(0)} \\\gamma^{(2)}\end{array}\right\}$
(8a) $\begin{array}{l}\left(A_{i j}, B_{i j}, D_{i j}, E_{i j}, F_{i j}, H_{i j}\right)= \\\int_{0}^{H} Q_{i j}\left(1, z, z^{2}, z^{3}, z^{4}, z^{6}\right) \mathrm{d} z+ \\\int_{-H}^{0} Q_{i j}\left(1, z, z^{2}, z^{3}, z^{4}, z^{6}\right) \mathrm{d} z \\(i, j=1,2,6)\end{array}$
(8b) $\begin{array}{c}\left(A_{i j}, D_{i j}, F_{i j}\right)=\int_{0}^{H} Q_{i j}\left(1, z^{2}, z^{4}\right) \mathrm{d} z+ \\\int_{-H}^{0} Q_{i j}\left(1, z, z^{2}, z^{3}, z^{4}, z^{6}\right) \mathrm{d} z \\(i, j=4,5)\end{array}$
(8c) $\begin{aligned}I_{i}=& \int_{-H}^{H} \rho\left(1, z, z^{2}, z^{3}, z^{4}, z^{5}, z^{6}\right) \mathrm{d} z \\&(i=0,1,2,3,4,5,6)\end{aligned}$
根据文献[13 ] ,双稳态复合材料层合板的位移可以表示为
(9a) $u_{0}=u_{1} x^{3}+u_{2} x y^{2}+u_{3} x$
(9b) $v_{0}=v_{1} y^{3}+v_{2} y x^{2}+v_{3} y$
(9c) $w_{0}=w_{1} x^{2}+w_{2} y^{2}$
(9d) $\phi_{x}=\phi_{1} x^{3}+\phi_{2} x y^{2}+\phi_{3} x$
(9e) $\phi_{y}=\phi_{4} y^{3}+\phi_{5} y x^{2}+\phi_{6} y$
(10) $\left.\begin{array}{lll}\bar{u}_{1}=u_{1}, & \bar{u}_{2}=L_{y}^{2} u_{2}, & \bar{u}_{3}=L_{x}^{2} u_{3} \\\bar{v}_{1}=v_{1}, & \bar{v}_{2}=L_{x}^{2} v_{2}, & \bar{v}_{3}=L_{y}^{2} v_{3} \\\bar{w}_{1}=L_{x} w_{1}, & \bar{w}_{2}=L_{y} w_{2}, & \bar{\phi}_{1}=L_{x} \phi_{1} \\\bar{\phi}_{2}=L_{x} L_{y}^{2} \phi_{2}, & \bar{\phi}_{3}=L_{x}^{3} \phi_{3}, & \bar{\phi}_{4}=L_{y} \phi_{4} \\\bar{\phi}_{5}=L_{y} L_{x}^{2} \phi_{5}, & \bar{\phi}_{6}=L_{y}^{3} \phi_{6} &\end{array}\right\}$
由于双稳态复合材料层合板的主要振动形式为横向振动,因此,忽略式(6)中与面内振动和扭转振动相关的时间项,用横向位移$w_0$表示面内和扭转位移分量$u_0$, $v_0$, $\phi_{x}$ 和 $\phi_{y}$,将式(9)代入式(6)并利用式(10),最终得到与双稳态板横向振动相关的无量纲常微分方程
(11a) $\begin{array}{c}\ddot{\bar{w}}_{1}+\bar{c}_{1} \dot{\bar{w}}_{1}+\bar{k}_{1} \bar{w}_{1}+\bar{k}_{2} \bar{w}_{2}+\bar{N}_{1}(\Delta T) \bar{w}_{1}+ \\\quad \bar{N}_{2}(\Delta T) \bar{w}_{2}+\bar{\alpha}_{1} \bar{w}_{1}^{2}+\bar{\alpha}_{2} \bar{w}_{2}^{2}+\bar{\alpha}_{3} \bar{w}_{1} \bar{w}_{2}+ \\\bar{\alpha}_{4} \bar{w}_{1}^{3}+\bar{\alpha}_{5} \bar{w}_{2}^{3}+\bar{\alpha}_{6} \bar{w}_{1}^{2} \bar{w}_{2}+\bar{\alpha}_{7} \bar{w}_{1} \bar{w}_{2}^{2}+ \\\bar{N}_{3}(\Delta T)=\bar{f} \cos (\bar{\Omega} \bar{t})\end{array}$
(11b) $\begin{aligned}\ddot{\bar{w}}_{2}+& \bar{c}_{2} \dot{\bar{w}}_{2}+\bar{k}_{3} \bar{w}_{1}+\bar{k}_{4} \bar{w}_{2}+\bar{N}_{4}(\Delta T) \bar{w}_{1}+\\& \bar{N}_{5}(\Delta T) \bar{w}_{2}+\bar{\beta}_{1} \bar{w}_{1}^{2}+\bar{\beta}_{3} \bar{w}_{1} \bar{w}_{2}+\bar{\beta}_{3} \bar{w}_{1} \bar{w}_{2}+\\& \bar{\beta}_{4} \bar{w}_{1}^{3}+\bar{\beta}_{5} \bar{w}_{2}^{3}+\bar{\beta}_{6} \bar{w}_{1}^{2} \bar{w}_{2}+\bar{\beta}_{7} \bar{w}_{1} \bar{w}_{2}^{2}+\\& \bar{N}_{6}(\Delta T)=\bar{f} \cos (\bar{\Omega} \bar{t})\end{aligned}$
为了便于分析,我们将在以下的分析中忽略无量纲方程中的无量纲符号。
2 数值模拟
为了研究双稳态板的动态跳跃现象和非线性振动,采用Runge-Kutta算法数值求解常微分方程(11a)(11b)。以激励幅值为控制参数,得到了李雅普诺夫指数图(图2 )、时间历程图(图3 )和庞加莱截面图(图4 )。
图2
图2
双稳态复合材料层合板以外激励幅值为控制参数的李雅普诺夫指数图
Fig.2
The Lyapunov exponent diagram of the bistable composite laminated plate with the base excitation amplitude as the control parameter
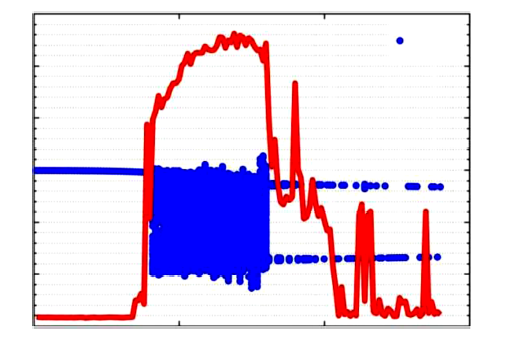
图3
图3
双稳态复合材料层合板的动态跳跃现象
Fig.3
The dynamic snap-through of the bistable composite laminated plate
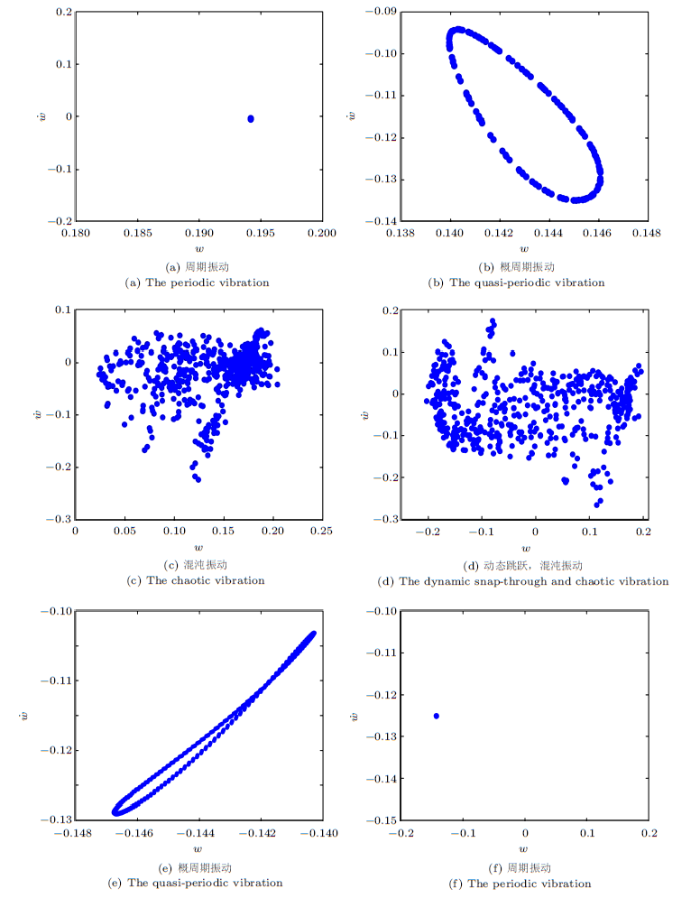
图4
图4
双稳态复合材料层合板的庞加莱截面
Fig.4
The Poincaré maps of the bistable composite laminated plate
我们可以通过李雅普诺夫指数图和庞加莱截面图确定系统的振动形式。由图2 可知,双稳态板的非线性振动包括周期振动、概周期振动和混沌振动。由图3 可知,双稳态板在发生动态跳跃的同时也发生了混沌振动,即双稳态板在混沌振动的过程中发生了动态跳跃。当激励幅值比较小时,双稳态复合材料层合板围绕上平衡点做小振幅的周期振动,如图4 (a)所示。逐步增大激励幅值,双稳态复合材料层合板围绕上平衡点做小振幅的概周期振动,如图4 (b)所示。继续增大激励幅值,双稳态复合材料层合板逐渐偏离上平衡点,在上平衡点附近做振幅比较大的混沌振动,如图4 (c)所示。当激励幅值增大至某一范围时,双稳态复合材料层合板不再只围绕上平衡点发生振动,而是在上下两个平衡点之间做大振幅的动态跳跃,如图3 和图4 (d)所示。当激励幅值超过某一值后,双稳态复合材料层合板不再发生跳跃,而是在下平衡点附近做振幅较小的概周期振动,如图4 (e)所示。当激励幅值进一步增大时,双稳态复合材料层合板围绕下平衡点做振幅较小的周期振动,如图4 (f)所示。由此可知,激励幅值并不是越大就越好,激励幅值过大,不一定发生动态跳跃,动态跳跃其实是激励幅值和频率共同作用的结果。
3 结论
本文以中心固支四边自由为边界条件的六层非对称正交双稳态复合材料层合板为研究对象。考虑几何非线性,基于三阶剪切变形理论和哈密顿原理建立动力学与控制方程。研究了基础激励幅值对双稳态复合材料层合板非线性振动和动态跳跃的影响。
改变基础激励幅值,双稳态复合材料层合板发生了动态跳跃,并且分别围绕两个平衡点发生了非线性振动。动态跳跃的发生是激励幅值和频率共同作用的结果。双稳态复合材料层合板在整个过程中发生了周期振动、概周期振动和混沌振动。混沌振动是发生动态跳跃的有利条件。
本文的研究可以为双稳态能量采集器、可变体飞行器和结构变形的压电驱动装置提供理论依据。
参考文献
View Option
[1]
杨柳 , 杨绍普 , 杨月婷 . 两自由度可调非线性减振器
力学与实践 , 2017 , 39 (2 ):175 -179
[本文引用: 1]
Yang Liu Yang Shaopu Yang Yueting . 2-D tunable nonlinear absorber
Mechanics in Engineering 2017 , 39 (2 ):175 -179 (in Chinese)
[本文引用: 1]
[2]
杨一帆 , 王红兵 , 李国芳 等 . 一类二自由度非线性能量阱系统的减振性能分析
力学与实践 , 2021 , 43 (1 ):66 -73
[本文引用: 1]
Yang Yifan Wang Hongbing Li Guofang , et al . Analysis of vibration reduction performance of a new two-DOF nonlinear energy sink
Mechanics in Engineering 2021 , 43 (1 ):66 -73 (in Chinese)
[本文引用: 1]
[3]
刘延柱 , 庄表中 . 多旋翼飞行器
力学与实践 , 2016 , 38 (3 ):338 -340
[本文引用: 1]
Liu Yanzhu Zhuang Biaozhong . On multi-rotor helicopter
Mechanics in Engineering 2016 , 38 (3 ):338 -340 (in Chinese)
[本文引用: 1]
[4]
Emam SA Hobeck J Inman DJ . Experimental investigation into the nonlinear dynamics of a bistable laminate
Nonlinear Dynamics 2019 , 95 :3019 -3039
DOI
URL
[本文引用: 1]
[5]
Cantera MA Romera JM Adarraga I , et al . Modelling and testing of the snap-through process of bistable cross-ply composites
Composite Structures 2015 , 120 :41 -52
DOI
URL
[本文引用: 1]
[6]
Vogl GA Hyer MW . Natural vibration of unsymmetric cross-ply laminates
Journal of Sound and Vibration 2011 , 330 :4764 -4779
DOI
URL
[本文引用: 1]
[7]
Arrieta AF Spelsberg-Korspeter G Hagedorn P , et al . Low-order model for the dynamics of bistable composite plates
International Journal of Solids and Structures 2011 , 22 :2025 -2043
[本文引用: 1]
[8]
Taki MS Tikani R Ziaei-Rad S , et al . Dynamic responses of cross-ply bistable composite laminates with piezoelectric layers
Archive of Applied Mechanics 2016 , 86 :1003 -1018
DOI
URL
[本文引用: 1]
[9]
Bilgen O Arrieta AF Friswell MI , et al . Dynamic control of a bistable wing under aerodynamic loading
Smart Material and Structures 2013 , 22 (2 ):025020
DOI
URL
[本文引用: 1]
[10]
Arrieta AF Bilgen O Friswell MI , et al . Modelling and configuration control of wing-shaped bistable piezoelectric composites under aerodynamic loads
Aerospace Science and Technology 2013 , 29 (1 ):453 -461
DOI
URL
[本文引用: 1]
[11]
Zhang W Liu YZ Wu MQ . Theory and experiment of nonlinear vibrations and dynamic snap-through phenomena for bistable asymmetric laminated composite square panels under foundation excitation
Composite Structures 2019 , 225 :111 140
[本文引用: 1]
[12]
Zhang W Ma WS Zhang YF , et al . Double excitation multi-stability and multi-pulse chaotic vibrations of bistable asymmetric laminated composite square panels under foundation force
Chaos 2020 , 30 :083 105
[本文引用: 1]
[13]
Pirrera A Avitabile D Weaver PM . Bistable plates for morphing structures: a refined analytical approach with high-order polynomials
International Journal of Solids and Structures 2010 , 47 :3412 -3425
DOI
URL
[本文引用: 1]
两自由度可调非线性减振器
1
2017
... 双稳态板壳结构有望被应用于减振器[1 -2 ] 、飞行器[3 ] 和能量采集器[4 ] 等.Cantera等[5 ] 通过在四个角处施加垂直机械力研究了双稳态板的静态跳跃过程.Vogl等[6 ] 利用瑞利李兹技术和哈密顿原理研究了非对称正交双稳态复合材料层合板的自由振动问题.Arrieta等[7 ] 建立了非对称双稳态复合材料层合板的单稳态低阶非线性动力学模型.Taki等[8 ] 利用瑞利李兹技术和哈密顿原理建立了表面铺设压电层的非对称正交双稳态复合材料层合板的动力学模型.Bilgen等[9 ] 详细研究了双稳态翼形复合材料层合板的气动响应.Arrieta等[10 ] 对非对称机翼状双稳态复合材料层合板的动态响应和气动特性进行了理论和实验研究.Zhang等[11 -12 ] 研究了非对称正交双稳态复合材料层合板在基础激励作用下的动态跳跃现象、非线性振动、双激励多稳定性、Shilnikov型多脉冲跳跃混沌振动及亚稳态混沌振动. ...
两自由度可调非线性减振器
1
2017
... 双稳态板壳结构有望被应用于减振器[1 -2 ] 、飞行器[3 ] 和能量采集器[4 ] 等.Cantera等[5 ] 通过在四个角处施加垂直机械力研究了双稳态板的静态跳跃过程.Vogl等[6 ] 利用瑞利李兹技术和哈密顿原理研究了非对称正交双稳态复合材料层合板的自由振动问题.Arrieta等[7 ] 建立了非对称双稳态复合材料层合板的单稳态低阶非线性动力学模型.Taki等[8 ] 利用瑞利李兹技术和哈密顿原理建立了表面铺设压电层的非对称正交双稳态复合材料层合板的动力学模型.Bilgen等[9 ] 详细研究了双稳态翼形复合材料层合板的气动响应.Arrieta等[10 ] 对非对称机翼状双稳态复合材料层合板的动态响应和气动特性进行了理论和实验研究.Zhang等[11 -12 ] 研究了非对称正交双稳态复合材料层合板在基础激励作用下的动态跳跃现象、非线性振动、双激励多稳定性、Shilnikov型多脉冲跳跃混沌振动及亚稳态混沌振动. ...
一类二自由度非线性能量阱系统的减振性能分析
1
2021
... 双稳态板壳结构有望被应用于减振器[1 -2 ] 、飞行器[3 ] 和能量采集器[4 ] 等.Cantera等[5 ] 通过在四个角处施加垂直机械力研究了双稳态板的静态跳跃过程.Vogl等[6 ] 利用瑞利李兹技术和哈密顿原理研究了非对称正交双稳态复合材料层合板的自由振动问题.Arrieta等[7 ] 建立了非对称双稳态复合材料层合板的单稳态低阶非线性动力学模型.Taki等[8 ] 利用瑞利李兹技术和哈密顿原理建立了表面铺设压电层的非对称正交双稳态复合材料层合板的动力学模型.Bilgen等[9 ] 详细研究了双稳态翼形复合材料层合板的气动响应.Arrieta等[10 ] 对非对称机翼状双稳态复合材料层合板的动态响应和气动特性进行了理论和实验研究.Zhang等[11 -12 ] 研究了非对称正交双稳态复合材料层合板在基础激励作用下的动态跳跃现象、非线性振动、双激励多稳定性、Shilnikov型多脉冲跳跃混沌振动及亚稳态混沌振动. ...
一类二自由度非线性能量阱系统的减振性能分析
1
2021
... 双稳态板壳结构有望被应用于减振器[1 -2 ] 、飞行器[3 ] 和能量采集器[4 ] 等.Cantera等[5 ] 通过在四个角处施加垂直机械力研究了双稳态板的静态跳跃过程.Vogl等[6 ] 利用瑞利李兹技术和哈密顿原理研究了非对称正交双稳态复合材料层合板的自由振动问题.Arrieta等[7 ] 建立了非对称双稳态复合材料层合板的单稳态低阶非线性动力学模型.Taki等[8 ] 利用瑞利李兹技术和哈密顿原理建立了表面铺设压电层的非对称正交双稳态复合材料层合板的动力学模型.Bilgen等[9 ] 详细研究了双稳态翼形复合材料层合板的气动响应.Arrieta等[10 ] 对非对称机翼状双稳态复合材料层合板的动态响应和气动特性进行了理论和实验研究.Zhang等[11 -12 ] 研究了非对称正交双稳态复合材料层合板在基础激励作用下的动态跳跃现象、非线性振动、双激励多稳定性、Shilnikov型多脉冲跳跃混沌振动及亚稳态混沌振动. ...
多旋翼飞行器
1
2016
... 双稳态板壳结构有望被应用于减振器[1 -2 ] 、飞行器[3 ] 和能量采集器[4 ] 等.Cantera等[5 ] 通过在四个角处施加垂直机械力研究了双稳态板的静态跳跃过程.Vogl等[6 ] 利用瑞利李兹技术和哈密顿原理研究了非对称正交双稳态复合材料层合板的自由振动问题.Arrieta等[7 ] 建立了非对称双稳态复合材料层合板的单稳态低阶非线性动力学模型.Taki等[8 ] 利用瑞利李兹技术和哈密顿原理建立了表面铺设压电层的非对称正交双稳态复合材料层合板的动力学模型.Bilgen等[9 ] 详细研究了双稳态翼形复合材料层合板的气动响应.Arrieta等[10 ] 对非对称机翼状双稳态复合材料层合板的动态响应和气动特性进行了理论和实验研究.Zhang等[11 -12 ] 研究了非对称正交双稳态复合材料层合板在基础激励作用下的动态跳跃现象、非线性振动、双激励多稳定性、Shilnikov型多脉冲跳跃混沌振动及亚稳态混沌振动. ...
多旋翼飞行器
1
2016
... 双稳态板壳结构有望被应用于减振器[1 -2 ] 、飞行器[3 ] 和能量采集器[4 ] 等.Cantera等[5 ] 通过在四个角处施加垂直机械力研究了双稳态板的静态跳跃过程.Vogl等[6 ] 利用瑞利李兹技术和哈密顿原理研究了非对称正交双稳态复合材料层合板的自由振动问题.Arrieta等[7 ] 建立了非对称双稳态复合材料层合板的单稳态低阶非线性动力学模型.Taki等[8 ] 利用瑞利李兹技术和哈密顿原理建立了表面铺设压电层的非对称正交双稳态复合材料层合板的动力学模型.Bilgen等[9 ] 详细研究了双稳态翼形复合材料层合板的气动响应.Arrieta等[10 ] 对非对称机翼状双稳态复合材料层合板的动态响应和气动特性进行了理论和实验研究.Zhang等[11 -12 ] 研究了非对称正交双稳态复合材料层合板在基础激励作用下的动态跳跃现象、非线性振动、双激励多稳定性、Shilnikov型多脉冲跳跃混沌振动及亚稳态混沌振动. ...
Experimental investigation into the nonlinear dynamics of a bistable laminate
1
2019
... 双稳态板壳结构有望被应用于减振器[1 -2 ] 、飞行器[3 ] 和能量采集器[4 ] 等.Cantera等[5 ] 通过在四个角处施加垂直机械力研究了双稳态板的静态跳跃过程.Vogl等[6 ] 利用瑞利李兹技术和哈密顿原理研究了非对称正交双稳态复合材料层合板的自由振动问题.Arrieta等[7 ] 建立了非对称双稳态复合材料层合板的单稳态低阶非线性动力学模型.Taki等[8 ] 利用瑞利李兹技术和哈密顿原理建立了表面铺设压电层的非对称正交双稳态复合材料层合板的动力学模型.Bilgen等[9 ] 详细研究了双稳态翼形复合材料层合板的气动响应.Arrieta等[10 ] 对非对称机翼状双稳态复合材料层合板的动态响应和气动特性进行了理论和实验研究.Zhang等[11 -12 ] 研究了非对称正交双稳态复合材料层合板在基础激励作用下的动态跳跃现象、非线性振动、双激励多稳定性、Shilnikov型多脉冲跳跃混沌振动及亚稳态混沌振动. ...
Modelling and testing of the snap-through process of bistable cross-ply composites
1
2015
... 双稳态板壳结构有望被应用于减振器[1 -2 ] 、飞行器[3 ] 和能量采集器[4 ] 等.Cantera等[5 ] 通过在四个角处施加垂直机械力研究了双稳态板的静态跳跃过程.Vogl等[6 ] 利用瑞利李兹技术和哈密顿原理研究了非对称正交双稳态复合材料层合板的自由振动问题.Arrieta等[7 ] 建立了非对称双稳态复合材料层合板的单稳态低阶非线性动力学模型.Taki等[8 ] 利用瑞利李兹技术和哈密顿原理建立了表面铺设压电层的非对称正交双稳态复合材料层合板的动力学模型.Bilgen等[9 ] 详细研究了双稳态翼形复合材料层合板的气动响应.Arrieta等[10 ] 对非对称机翼状双稳态复合材料层合板的动态响应和气动特性进行了理论和实验研究.Zhang等[11 -12 ] 研究了非对称正交双稳态复合材料层合板在基础激励作用下的动态跳跃现象、非线性振动、双激励多稳定性、Shilnikov型多脉冲跳跃混沌振动及亚稳态混沌振动. ...
Natural vibration of unsymmetric cross-ply laminates
1
2011
... 双稳态板壳结构有望被应用于减振器[1 -2 ] 、飞行器[3 ] 和能量采集器[4 ] 等.Cantera等[5 ] 通过在四个角处施加垂直机械力研究了双稳态板的静态跳跃过程.Vogl等[6 ] 利用瑞利李兹技术和哈密顿原理研究了非对称正交双稳态复合材料层合板的自由振动问题.Arrieta等[7 ] 建立了非对称双稳态复合材料层合板的单稳态低阶非线性动力学模型.Taki等[8 ] 利用瑞利李兹技术和哈密顿原理建立了表面铺设压电层的非对称正交双稳态复合材料层合板的动力学模型.Bilgen等[9 ] 详细研究了双稳态翼形复合材料层合板的气动响应.Arrieta等[10 ] 对非对称机翼状双稳态复合材料层合板的动态响应和气动特性进行了理论和实验研究.Zhang等[11 -12 ] 研究了非对称正交双稳态复合材料层合板在基础激励作用下的动态跳跃现象、非线性振动、双激励多稳定性、Shilnikov型多脉冲跳跃混沌振动及亚稳态混沌振动. ...
Low-order model for the dynamics of bistable composite plates
1
2011
... 双稳态板壳结构有望被应用于减振器[1 -2 ] 、飞行器[3 ] 和能量采集器[4 ] 等.Cantera等[5 ] 通过在四个角处施加垂直机械力研究了双稳态板的静态跳跃过程.Vogl等[6 ] 利用瑞利李兹技术和哈密顿原理研究了非对称正交双稳态复合材料层合板的自由振动问题.Arrieta等[7 ] 建立了非对称双稳态复合材料层合板的单稳态低阶非线性动力学模型.Taki等[8 ] 利用瑞利李兹技术和哈密顿原理建立了表面铺设压电层的非对称正交双稳态复合材料层合板的动力学模型.Bilgen等[9 ] 详细研究了双稳态翼形复合材料层合板的气动响应.Arrieta等[10 ] 对非对称机翼状双稳态复合材料层合板的动态响应和气动特性进行了理论和实验研究.Zhang等[11 -12 ] 研究了非对称正交双稳态复合材料层合板在基础激励作用下的动态跳跃现象、非线性振动、双激励多稳定性、Shilnikov型多脉冲跳跃混沌振动及亚稳态混沌振动. ...
Dynamic responses of cross-ply bistable composite laminates with piezoelectric layers
1
2016
... 双稳态板壳结构有望被应用于减振器[1 -2 ] 、飞行器[3 ] 和能量采集器[4 ] 等.Cantera等[5 ] 通过在四个角处施加垂直机械力研究了双稳态板的静态跳跃过程.Vogl等[6 ] 利用瑞利李兹技术和哈密顿原理研究了非对称正交双稳态复合材料层合板的自由振动问题.Arrieta等[7 ] 建立了非对称双稳态复合材料层合板的单稳态低阶非线性动力学模型.Taki等[8 ] 利用瑞利李兹技术和哈密顿原理建立了表面铺设压电层的非对称正交双稳态复合材料层合板的动力学模型.Bilgen等[9 ] 详细研究了双稳态翼形复合材料层合板的气动响应.Arrieta等[10 ] 对非对称机翼状双稳态复合材料层合板的动态响应和气动特性进行了理论和实验研究.Zhang等[11 -12 ] 研究了非对称正交双稳态复合材料层合板在基础激励作用下的动态跳跃现象、非线性振动、双激励多稳定性、Shilnikov型多脉冲跳跃混沌振动及亚稳态混沌振动. ...
Dynamic control of a bistable wing under aerodynamic loading
1
2013
... 双稳态板壳结构有望被应用于减振器[1 -2 ] 、飞行器[3 ] 和能量采集器[4 ] 等.Cantera等[5 ] 通过在四个角处施加垂直机械力研究了双稳态板的静态跳跃过程.Vogl等[6 ] 利用瑞利李兹技术和哈密顿原理研究了非对称正交双稳态复合材料层合板的自由振动问题.Arrieta等[7 ] 建立了非对称双稳态复合材料层合板的单稳态低阶非线性动力学模型.Taki等[8 ] 利用瑞利李兹技术和哈密顿原理建立了表面铺设压电层的非对称正交双稳态复合材料层合板的动力学模型.Bilgen等[9 ] 详细研究了双稳态翼形复合材料层合板的气动响应.Arrieta等[10 ] 对非对称机翼状双稳态复合材料层合板的动态响应和气动特性进行了理论和实验研究.Zhang等[11 -12 ] 研究了非对称正交双稳态复合材料层合板在基础激励作用下的动态跳跃现象、非线性振动、双激励多稳定性、Shilnikov型多脉冲跳跃混沌振动及亚稳态混沌振动. ...
Modelling and configuration control of wing-shaped bistable piezoelectric composites under aerodynamic loads
1
2013
... 双稳态板壳结构有望被应用于减振器[1 -2 ] 、飞行器[3 ] 和能量采集器[4 ] 等.Cantera等[5 ] 通过在四个角处施加垂直机械力研究了双稳态板的静态跳跃过程.Vogl等[6 ] 利用瑞利李兹技术和哈密顿原理研究了非对称正交双稳态复合材料层合板的自由振动问题.Arrieta等[7 ] 建立了非对称双稳态复合材料层合板的单稳态低阶非线性动力学模型.Taki等[8 ] 利用瑞利李兹技术和哈密顿原理建立了表面铺设压电层的非对称正交双稳态复合材料层合板的动力学模型.Bilgen等[9 ] 详细研究了双稳态翼形复合材料层合板的气动响应.Arrieta等[10 ] 对非对称机翼状双稳态复合材料层合板的动态响应和气动特性进行了理论和实验研究.Zhang等[11 -12 ] 研究了非对称正交双稳态复合材料层合板在基础激励作用下的动态跳跃现象、非线性振动、双激励多稳定性、Shilnikov型多脉冲跳跃混沌振动及亚稳态混沌振动. ...
Theory and experiment of nonlinear vibrations and dynamic snap-through phenomena for bistable asymmetric laminated composite square panels under foundation excitation
1
2019
... 双稳态板壳结构有望被应用于减振器[1 -2 ] 、飞行器[3 ] 和能量采集器[4 ] 等.Cantera等[5 ] 通过在四个角处施加垂直机械力研究了双稳态板的静态跳跃过程.Vogl等[6 ] 利用瑞利李兹技术和哈密顿原理研究了非对称正交双稳态复合材料层合板的自由振动问题.Arrieta等[7 ] 建立了非对称双稳态复合材料层合板的单稳态低阶非线性动力学模型.Taki等[8 ] 利用瑞利李兹技术和哈密顿原理建立了表面铺设压电层的非对称正交双稳态复合材料层合板的动力学模型.Bilgen等[9 ] 详细研究了双稳态翼形复合材料层合板的气动响应.Arrieta等[10 ] 对非对称机翼状双稳态复合材料层合板的动态响应和气动特性进行了理论和实验研究.Zhang等[11 -12 ] 研究了非对称正交双稳态复合材料层合板在基础激励作用下的动态跳跃现象、非线性振动、双激励多稳定性、Shilnikov型多脉冲跳跃混沌振动及亚稳态混沌振动. ...
Double excitation multi-stability and multi-pulse chaotic vibrations of bistable asymmetric laminated composite square panels under foundation force
1
2020
... 双稳态板壳结构有望被应用于减振器[1 -2 ] 、飞行器[3 ] 和能量采集器[4 ] 等.Cantera等[5 ] 通过在四个角处施加垂直机械力研究了双稳态板的静态跳跃过程.Vogl等[6 ] 利用瑞利李兹技术和哈密顿原理研究了非对称正交双稳态复合材料层合板的自由振动问题.Arrieta等[7 ] 建立了非对称双稳态复合材料层合板的单稳态低阶非线性动力学模型.Taki等[8 ] 利用瑞利李兹技术和哈密顿原理建立了表面铺设压电层的非对称正交双稳态复合材料层合板的动力学模型.Bilgen等[9 ] 详细研究了双稳态翼形复合材料层合板的气动响应.Arrieta等[10 ] 对非对称机翼状双稳态复合材料层合板的动态响应和气动特性进行了理论和实验研究.Zhang等[11 -12 ] 研究了非对称正交双稳态复合材料层合板在基础激励作用下的动态跳跃现象、非线性振动、双激励多稳定性、Shilnikov型多脉冲跳跃混沌振动及亚稳态混沌振动. ...
Bistable plates for morphing structures: a refined analytical approach with high-order polynomials
1
2010
... 根据文献[13 ] ,双稳态复合材料层合板的位移可以表示为 ...





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}