逐段分析求和法[1 ] (或称为逐段刚化法[2 ] 或逐段软化法[3 ] )是梁变形计算中的一种重要方法。现有材料力学教材关于该方法的介绍主要有三种方式,第一种是只明确提出叠加法而不提逐段分析求和法[4 -7 ] ,仅把逐段分析求和法作为叠加法的一种实现方法。第二种是两种方法都明确提出来,但是对于这种方法的来源以及理论基础没有详细说明[2 ] 。第三种是将该方法统一归于梁变形计算的叠加法一节,并明确指出逐段分析求和法与叠加法的理论基础其实并不相同,叠加法的理论基础是力的独立作用原理,而逐段分析求和法的理论基础是梁局部变形与总体位移之间的几何关系[1 ,3 ] ,但未说明这个几何关系到底是什么,以及这种几何关系与具体应用时的方法是怎样联系起来的。一般来说,同学们对于力的独立作用原理都很清楚,但是对于梁局部变形与总体位移之间的几何关系,理解起来就比较模糊了。另外,教师在介绍逐段分析求和法时,往往偏重于该方法的具体应用[8 ] ,忽略对这种方法的力学本质的分析,以至于同学们很容易认为这是一种全新的方法,并只注重采用这种方法做习题,而不去思考该方法背后的思想和原理。本文试图从钓鱼竿这一生活中的实例入手,通过对钓鱼竿的变形分析自然引入逐段分析求和法,并由变形分析导出具体计算时采用的方法,即逐段刚化法或逐段软化法。进而讨论应用逐段分析求和法的前提条件,以及其与叠加法的本质区别。最后,通过从离散逐步逼近连续的数学思想,阐明逐段分析求和法与积分法的内在联系。
1 钓鱼竿挠度计算的基本力学模型
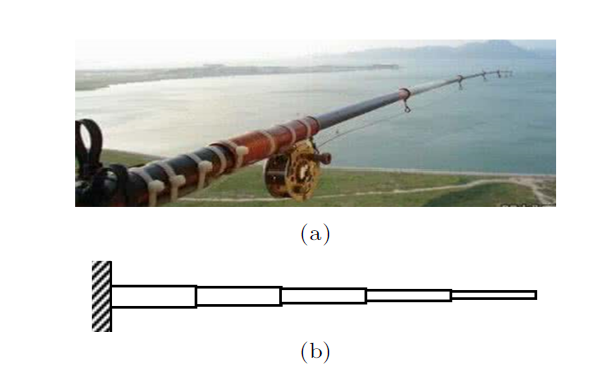
钓鱼竿是大家非常熟悉的一种娱乐或生活用具,如图1 (a)所示。尽管一般不会去思考钓鱼竿的变形问题,但都会注意到钓鱼竿的结构形式。用日常生活用语描述就是一节一节的,用材料力学术语描述就是典型的变截面梁。因此,钓鱼竿的力学模型可以表示为如图1 (b)所示结构。
图1
当钓鱼竿钓上鱼的时候,鱼竿发生明显的弯曲变形,如图2 (a)所示。此时,钓鱼竿的力学模型可以简化为变截面梁在自由端受铅垂集中力$F$,如图2 (b)所示。观察钓鱼竿的变形,能够直观认识到,钓鱼竿端头的位移与鱼竿每一段的弯曲变形都相关,这便是教材上所说的“梁的总体位移与局部变形之间的关系”。但是,到底总体位移与局部变形之间是什么关系,以及如何来描述这种关系,这就需要进行定量的分析与推导了。
图2
为了便于进行问题的分析与说明,首先研究两段变截面梁的变形问题,其力学模型如图3 (a)所示。按照一般的教学安排,在梁变形计算部分,首先介绍的是积分法,然后是叠加法。介绍这两种方法时都是以等截面均质梁为研究对象的。因此,变截面梁的变形计算对于同学们来说是一个新的问题。在材料力学的学习过程中,从变形观察入手来进行力学问题的分析是一个重要的方法。通过对变形规律的定性分析和描述,能够很好地启发定量建立相关方程。因此,在并不明确采用何种方法进行变截面梁的变形分析时,可以直观地画出两段变截面梁的变形图,如图3 (b)所示。图中为了方便起见,定义$A_{1}A_{0}$为第1段,$A_{2}A_{1}$为第2段。
图3
从图中可以看出,$A_{0}$截面的挠度可以分成三部分,即$w^{\rm a}$,$w^{\rm b}$和$w^{\rm c}$,并且有
(1) $w_{A_{0} } =w^{\rm a}+w^{\rm b}+w^{\rm c}$
式中,$w^{\rm c}$为第2段弯曲变形时$A_{1}$截面挠度所引起的$A_{0}$截面挠度,$w^{\rm b}$为第2段弯曲变形产生的$A_{1}$截面转角所引起的$A_{0}$截面挠度,$w^{\rm a}$则为第1段自身弯曲变形所引起的$A_{0}$截面挠度。即,$w^{\rm c}$和$w^{\rm b}$为第2段的变形效果,$w^{\rm a}$为第1段的变形效果。于是,式(1)可以描述为:变截面梁$A_{0}$截面的挠度等于各段变形效果的总和。将这一描述推广到一般情况,即为:梁总体位移等于各局部变形效果的总和。这就是梁总体位移与局部变形之间的几何关系。
2 钓鱼竿基本力学模型的计算方法
上一节建立了钓鱼竿基本力学模型,即两段变截面梁模型,并通过变形分析得到了变截面梁总体挠度与各段变形之间的关系,即由式 (1)给出的总体位移等于各段变形效果总和。按照这一思路,只需求出各段变形效果,问题就得以解决。但是在梁的真实变形中,两段的变形总是同时发生的,如何才能将两段变形效果分开进行计算。或者说,在什么情况下,变截面梁的挠度仅与其中一段的变形效果相关。按照这一思路,可以得到如图4 (a)和图4 (b)所示力学模型,即对梁每一段的变形效果进行分解。
图4
图4 (a)中,$A_{2}A_{1}$段视为刚体,在这种情况下$A_{0}$截面的挠度仅包含$A_{1}A_{0}$段的变形效果。图4 (b)中,$A_{1}A_{0}$段视为刚体,此时,$A_{0}$截面的挠度仅包含$A_{2}A_{1}$段的变形效果。这一方法被称为逐段刚化法[2 ] ,也有教材称之为逐段软化法[3 ] 。这两种名称都比较直观形象,易于理解,只是各自的参考构型不同而已。逐段刚化法是以弹性梁为参考构型,通过刚化其他段来分析某一段的变形效果,而逐段软化法是以刚性梁为参考构型,通过软化某一段来求该段的变形效果。
通过比较图4 与图3 (b),还可以得到应用逐段分析求和法的前提条件。也就是说,在何种情况下,图3 (b)所示梁的变形与图4 所示两种变形效果的总和是相等的。很显然,只有在原始构型下进行受力和变形分析时,这种变形分解才成立。因此,小变形条件是逐段分析求和法的前提条件。需要说明的是,逐段分析求和法并没有线弹性的限制条件。从图4 可以看出,这个分解过程完全是基于变形几何的,与材料的物理特性无关。这是逐段分析求和法与叠加法的本质区别。关于这一点,文献[9 ]从能量法的角度进行了相关讨论。此处结合一个具体例子进行简单说明。
图5 为一非线性悬臂梁,梁材料的应力$\sigma$与应变$\varepsilon$满足关系式$\sigma =k\varepsilon^{{1}/{2}}$,$k$为刚度,求$A_{0}$截面挠度。
图5
由于材料为非线性,不能采用叠加法求解。认为材料的非线性对梁的变形几何关系无影响,则在平面假设与单向受力假设成立的前提下,可以得到梁微段的几何方程、物理方程和静力学方程
(2) $\left.\begin{array}{l}\varepsilon =\dfrac{y}{\rho },\ \sigma =k\sqrt {\dfrac{y}{\rho }} \\ \int_A \sigma \mbox{d}A =0,\ \int_A y\cdot \sigma \mbox{d}A =M\end{array}\right\}$
式中,$\rho$为中性层曲率半径,$A$为横截面面积,$M$为横截面上的弯矩,$y$轴坐标原点位于中性轴上。根据上述方程,以及小变形假设可得
(3) $w^{\prime \prime}(x)=\frac{1}{\rho}=\frac{M^{2}}{\Lambda}, \quad \Lambda=\left(k \int_{A} y^{3 / 2} \mathrm{~d} A\right)^{2}$
进一步,根据平面假设和小变形条件,得到截面转角方程
(4) $\theta (x)={w}'(x)=\int {\dfrac{M^{2}}{\varLambda }\mbox{d}x} +C=\dfrac{M^{2}x}{\varLambda }+C$
(5) $w(x)=\iint {\dfrac{M^{2}}{\varLambda }\mbox{d}x} +Cx+D=\dfrac{M^{2}x^{2}}{2\varLambda }+Cx+D$
式中,$C$和$D$为积分常数,需要根据位移边界条件和连续条件确定。根据式(4)和式(5),直接对图5 (a)分段计算,得到梁$A_{0}$截面的总挠度为${13M_{0}^{2} a^{2}}/({2\varLambda })$。
按照上述方程可以得到长为$l$的悬臂梁自由端受集中力偶矩时,自由端挠度和转角的表达式为
(6) $\theta (x)=\dfrac{M^{2}l}{\varLambda},\ w(x)=\dfrac{M^{2}l^{2}}{2\varLambda }$
根据式(6),采用逐段分析求和法分别求解图5 (b)刚化$A_{1}A_{0}$段时$A_{0}$截面的挠度,和图5 (c)刚化$A_{2}A_{1}$段时$A_{0}$截面的挠度。图5 (b)梁$A_{0}$截面的挠度为${(2M_{0})^{2}a^{2}}/({2\varLambda })+{(2M_{0} )^{2}a}/{\varLambda }\cdot a$,图5 (c)梁$A_{0}$截面的挠度为$M_{0}^{2}a^{2}/({2\varLambda})$。相加得到$A_{0}$截面的总挠度为${13M_{0}^{2} a^{2}}/({2\varLambda})$,与直接根据式(4)和式(5)计算所得结果一致。
若采用叠加法,计算仅在$A_{1}$截面作用力偶矩$M_{0}$时$A_{0}$截面挠度为${M_{0}^{2}a^{2}}/({2\varLambda })+{M_{0}^{2} a}/{\varLambda }\cdot a$,以及仅在$A_{0}$截面作用力偶矩$M_{0}$时$A_{0}$截面挠度为${M_{0}^{2}(2a)^{2}}/({2\varLambda })$,相加得总挠度为${7M_{0}^{2} a^{2}}/({2\varLambda })$,结果错误。
3 钓鱼竿总位移的计算
前面建立了钓鱼竿基本力学模型以及具体的计算方法,现需将基本模型得到的结果应用于钓鱼竿整体模型中。从整体模型中任意截取两段,如图6 (a)所示,其变形形式可以用如图6 (b)所示的基本模型来描述,即相当于图3 所示基本模型中固支端存在挠度和转角。
图6
对于图6 (b)所示基本模型,可以写出$A_{k-1}$截面挠度和转角的表达式
(7) $w_{k-1} =w_{k-1}^{0} +\theta_{k} l_{k} +w_{k}$
(8) $\theta_{k-1} =\theta_{k-1}^{0} +\theta_{k}$
式中,$w_{k-1}$,$w_{k}$分别表示$A_{k-1}$和$A_{k}$截面的挠度{;} $\theta_{k-1}$, $\theta_{k}$分别表示$A_{k-1}$和$A_{k}$截面的转角{;} $w_{k-1}^{0}$, $\theta_{k-1}^{0}$分别表示由于$A_{k}A_{k-1}$段自身变形引起的$A_{k-1}$截面的挠度和转角{;} $l_{k}$表示$A_{k}A_{k-1}$段的长度。
进一步分析式(7)和式(8)的构成,式(7)和式(8)的第1项为自身变形效果,式(7)的后两项和式(8)的第二项又可以理解为考虑变形连续条件得到的附加项。因此,逐段分析求和法又可以理解为就是考虑了自身变形效果和变形连续条件的一种方法。
(9) $\left.\begin{array}{ll} w_{0} =w_{0}^{0} +\theta_{1} l_{1} +w_{1}, & \theta_{0} =\theta_{0}^{0} +\theta_{1} \\ \cdots \cdots \\ w_{k-1} =w_{k-1}^{0} +\theta_{k} l_{k} +w_{k}, & \theta_{k-1} =\theta_{k-1}^{0} +\theta_{k} \\ \cdots \cdots \\ w_{N-1} =w_{N-1}^{0} +\theta_{N} l_{N} +w_{N}, & \theta_{N-1} =\theta_{N-1}^{0} +\theta_{N} \\ w_{N} =0, & \theta_{N} =0 \\ \end{array}\right\}$
(10) $w_{0}=\sum_{k=0}^{N} w_{k}^{0}+\sum_{k=0}^{N}\left(\theta_{k}^{0} \cdot \sum_{i=1}^{k} l_{i}\right)$
式中,右边第一项就是各段自身的变形效果,第二项就是各段之间的转角连续条件引起的附加效果。
4 逐段分析求和法与积分法的内在联系
通过前面的分析,对逐段分析求和法的方法来源和物理本质已经有了比较清楚的认识,下面来探讨逐段分析求和法与积分法的关系。
首先,在线弹性情况下,积分法是基于挠曲轴的二阶近似微分方程,通过积分得到梁截面挠度和转角的方法,是进行梁变形分析的最基本方法。其基本方程为
(11) $\left.\begin{array}{l}\dfrac{\mbox{d}^{2}w}{\mbox{d}x^{2}}=\dfrac{M(x)}{EI} \\ \theta (x)=\dfrac{\mbox{d}w}{\mbox{d}x}=\int {\dfrac{M(x)}{EI}\mbox{d}x+C} \\ w(x)=\int {\theta (x)\mbox{d}x+} D \end{array}\right\}$
式中的积分常数$C$和$D$需要根据位移边界和连续条件确定。
为了研究逐段分析求和法与积分法之间的关系,需要对图3 所示基本力学模型进行简单的数学处理。考虑到积分法的研究对象是等截面梁问题,而阐述逐段分析求和法时研究对象是分段的变截面梁问题,可以通过将离散问题连续化的方法建立这两种模型之间的关系。假设图3 (a)中的变截面梁每一段长度为d$x$,则可以得到图7 (a)所示力学模型,该模型的变形图如图7 (b)所示。
图7
(12) $w_{x-\mbox{d}x} =w_{x-\mbox{d}x}^{0} +\theta_{x} \mbox{d}x+w_{x}$
(13) $w_{x-\mbox{d}x} -w_{x} =\theta_{x} \mbox{d}x+w_{x-\mbox{d}x}^{0}$
(14) $\mbox{d}w_{x} =\theta_{x} \mbox{d}x+w_{x-{\rm d}x}^{0}$
式中$w_{x-\mbox{d}x}^{0}$为右侧d$x$段自身变形产生的挠度。在小变形前提下,工程实际中梁截面挠度为梁长度的高次函数。因此,当d$x$无穷小时,$w_{x-\mbox{d}x}^{0}$为d$x$的高阶小量。则式(14)变为
(15) $\mbox{d}w_{x} =\theta_{x} \mbox{d}x$
进一步,在平面假设的前提下,挠曲轴切线转角与梁的截面转角相等。因此,式(15)正是积分法中挠度和转角的关系方程。因此,在线弹性小变形条件以及平面假设成立的情况下可以将逐段分析求和法理解为积分法在分段的变截面梁或者分段的变刚度梁时的具体体现。
将这种内在关系推广到非线性情况。若梁为非线性材料,在小变形和平面假设成立的前提下有
$\left.\begin{array}{l} \dfrac{\mbox{d}^{2}w}{\mbox{d}x^{2}}=\pm \dfrac{1}{\rho } \theta (x)=\dfrac{\mbox{d}w}{\mbox{d}x} \\ w(x)=\int {\theta (x)\mbox{d}x+} D \end{array}\right\}$
式中,$\rho$为梁中性层曲率半径。此时梁中性层曲率半径就不能再表示成$M(x)/(EI)$的形式了,需要根据材料的物理方程进行具体推导。但是,在小变形和平面假设成立的前提下,截面转角与挠度之间的导数关系仍然成立,而基于图7 推导出来的式(12)$\sim$式(15)亦成立,其并不需要利用梁变形与内力之间的物理关系。因此,在小变形和平面假设成立的前提下,对于非线性情况,逐段分析求和法亦等价于挠度和转角的积分关系在分段的变截面梁或者分段的变刚度梁时的具体体现。
5 结论
本文以钓鱼竿为例,通过建立基本力学模型,从变形分析入手,自然引入逐段分析求和法,进而得到在计算每一段变形效果时的逐段刚化法或逐段软化法。并讨论了应用逐段分析求和法的前提条件,以及与积分法的内在关系。可以总结如下。
(1)逐段分析求和法是基于梁总体位移等于各局部变形效果的总和这一几何关系建立的。
(2) 应用逐段分析求和法的前提条件是小变形,并不要求结构为线弹性。这是与叠加法最本质的区别。
(3) 对于线弹性小变形情况,在平面假设成立的前提下,逐段分析求和法与积分法是等价的,逐段分析求和法是积分法在分段变刚度梁时的具体体现。对于非线性材料,当满足小变形条件和平面假设时,逐段分析求和法亦等价于挠度和转角的积分关系在分段的变截面梁或者分段的变刚度梁时的具体体现。
参考文献
View Option
[1]
单辉祖 . 材料力学 , 第3版. 北京 : 高等教育出版社 , 2009
[本文引用: 2]
Shan Huizu . Mechanics of Materials, 3rd edn. Beijing : Higher Education Press , 2009 (in Chinese)
[本文引用: 2]
[2]
殷雅俊 , 范钦珊 . 材料力学, 第3版 . 北京 : 高等教育出版社 , 2019
[本文引用: 3]
Yin Yajun Fan Qinshan . Mechanics of Materials, 3rd edn. Beijing : Higher Education Press , 2019 (in Chinese)
[本文引用: 3]
[3]
单辉祖 . 材料力学, 第4版 . 北京 : 高等教育出版社 , 2016
[本文引用: 3]
Shan Huizu . Mechanics of Materials, 4th edn. Beijing : Higher Education Press , 2016 (in Chinese)
[本文引用: 3]
[4]
刘鸿文 . 材料力学, 第3版 . 北京 : 高等教育出版社 , 1992
[本文引用: 1]
Liu Hongwen . Mechanics of Materials, 3rd edn. Beijing : Higher Education Press , 1992 (in Chinese)
[本文引用: 1]
[5]
孙训芳 . 材料力学 , 第3版. 北京 : 高等教育出版社 , 2000
Sun Xunfang . Mechanics of Materials, 3rd edn. Beijing : Higher Education Press , 2000 (in Chinese)
[6]
Beer FP Johnston ER John JR . Mechanics of Materials (影印版) . 北京 : 清华大学出版社 , 2003
[7]
Gere JM . Mechanics of Materials, 5th edn. California, United States of America: Thomson Learning , 2001
[本文引用: 1]
[8]
陈兰新 . 材料力学中逐段刚化法的灵活应用
教育研究 , 1998 (1 ): 25 -28
[本文引用: 1]
[9]
蒋持平 , 严鹏 . 逐段变形效应叠加法的能量法证明及其推广
力学与实践 , 2004 , 26 (4 ): 66 -67
[本文引用: 1]
Jiang Chiping Yan Peng . A proof of the energy theorem for the segment-by-segment deformation superposition and its extension
Mechanics in Engineering 2004 , 26 (4 ): 66 -67 (in Chinese)
[本文引用: 1]
2
2009
... 逐段分析求和法[1 ] (或称为逐段刚化法[2 ] 或逐段软化法[3 ] )是梁变形计算中的一种重要方法.现有材料力学教材关于该方法的介绍主要有三种方式,第一种是只明确提出叠加法而不提逐段分析求和法[4 -7 ] ,仅把逐段分析求和法作为叠加法的一种实现方法.第二种是两种方法都明确提出来,但是对于这种方法的来源以及理论基础没有详细说明[2 ] .第三种是将该方法统一归于梁变形计算的叠加法一节,并明确指出逐段分析求和法与叠加法的理论基础其实并不相同,叠加法的理论基础是力的独立作用原理,而逐段分析求和法的理论基础是梁局部变形与总体位移之间的几何关系[1 ,3 ] ,但未说明这个几何关系到底是什么,以及这种几何关系与具体应用时的方法是怎样联系起来的.一般来说,同学们对于力的独立作用原理都很清楚,但是对于梁局部变形与总体位移之间的几何关系,理解起来就比较模糊了.另外,教师在介绍逐段分析求和法时,往往偏重于该方法的具体应用[8 ] ,忽略对这种方法的力学本质的分析,以至于同学们很容易认为这是一种全新的方法,并只注重采用这种方法做习题,而不去思考该方法背后的思想和原理.本文试图从钓鱼竿这一生活中的实例入手,通过对钓鱼竿的变形分析自然引入逐段分析求和法,并由变形分析导出具体计算时采用的方法,即逐段刚化法或逐段软化法.进而讨论应用逐段分析求和法的前提条件,以及其与叠加法的本质区别.最后,通过从离散逐步逼近连续的数学思想,阐明逐段分析求和法与积分法的内在联系. ...
... [1 ,3 ],但未说明这个几何关系到底是什么,以及这种几何关系与具体应用时的方法是怎样联系起来的.一般来说,同学们对于力的独立作用原理都很清楚,但是对于梁局部变形与总体位移之间的几何关系,理解起来就比较模糊了.另外,教师在介绍逐段分析求和法时,往往偏重于该方法的具体应用[8 ] ,忽略对这种方法的力学本质的分析,以至于同学们很容易认为这是一种全新的方法,并只注重采用这种方法做习题,而不去思考该方法背后的思想和原理.本文试图从钓鱼竿这一生活中的实例入手,通过对钓鱼竿的变形分析自然引入逐段分析求和法,并由变形分析导出具体计算时采用的方法,即逐段刚化法或逐段软化法.进而讨论应用逐段分析求和法的前提条件,以及其与叠加法的本质区别.最后,通过从离散逐步逼近连续的数学思想,阐明逐段分析求和法与积分法的内在联系. ...
2
2009
... 逐段分析求和法[1 ] (或称为逐段刚化法[2 ] 或逐段软化法[3 ] )是梁变形计算中的一种重要方法.现有材料力学教材关于该方法的介绍主要有三种方式,第一种是只明确提出叠加法而不提逐段分析求和法[4 -7 ] ,仅把逐段分析求和法作为叠加法的一种实现方法.第二种是两种方法都明确提出来,但是对于这种方法的来源以及理论基础没有详细说明[2 ] .第三种是将该方法统一归于梁变形计算的叠加法一节,并明确指出逐段分析求和法与叠加法的理论基础其实并不相同,叠加法的理论基础是力的独立作用原理,而逐段分析求和法的理论基础是梁局部变形与总体位移之间的几何关系[1 ,3 ] ,但未说明这个几何关系到底是什么,以及这种几何关系与具体应用时的方法是怎样联系起来的.一般来说,同学们对于力的独立作用原理都很清楚,但是对于梁局部变形与总体位移之间的几何关系,理解起来就比较模糊了.另外,教师在介绍逐段分析求和法时,往往偏重于该方法的具体应用[8 ] ,忽略对这种方法的力学本质的分析,以至于同学们很容易认为这是一种全新的方法,并只注重采用这种方法做习题,而不去思考该方法背后的思想和原理.本文试图从钓鱼竿这一生活中的实例入手,通过对钓鱼竿的变形分析自然引入逐段分析求和法,并由变形分析导出具体计算时采用的方法,即逐段刚化法或逐段软化法.进而讨论应用逐段分析求和法的前提条件,以及其与叠加法的本质区别.最后,通过从离散逐步逼近连续的数学思想,阐明逐段分析求和法与积分法的内在联系. ...
... [1 ,3 ],但未说明这个几何关系到底是什么,以及这种几何关系与具体应用时的方法是怎样联系起来的.一般来说,同学们对于力的独立作用原理都很清楚,但是对于梁局部变形与总体位移之间的几何关系,理解起来就比较模糊了.另外,教师在介绍逐段分析求和法时,往往偏重于该方法的具体应用[8 ] ,忽略对这种方法的力学本质的分析,以至于同学们很容易认为这是一种全新的方法,并只注重采用这种方法做习题,而不去思考该方法背后的思想和原理.本文试图从钓鱼竿这一生活中的实例入手,通过对钓鱼竿的变形分析自然引入逐段分析求和法,并由变形分析导出具体计算时采用的方法,即逐段刚化法或逐段软化法.进而讨论应用逐段分析求和法的前提条件,以及其与叠加法的本质区别.最后,通过从离散逐步逼近连续的数学思想,阐明逐段分析求和法与积分法的内在联系. ...
3
2019
... 逐段分析求和法[1 ] (或称为逐段刚化法[2 ] 或逐段软化法[3 ] )是梁变形计算中的一种重要方法.现有材料力学教材关于该方法的介绍主要有三种方式,第一种是只明确提出叠加法而不提逐段分析求和法[4 -7 ] ,仅把逐段分析求和法作为叠加法的一种实现方法.第二种是两种方法都明确提出来,但是对于这种方法的来源以及理论基础没有详细说明[2 ] .第三种是将该方法统一归于梁变形计算的叠加法一节,并明确指出逐段分析求和法与叠加法的理论基础其实并不相同,叠加法的理论基础是力的独立作用原理,而逐段分析求和法的理论基础是梁局部变形与总体位移之间的几何关系[1 ,3 ] ,但未说明这个几何关系到底是什么,以及这种几何关系与具体应用时的方法是怎样联系起来的.一般来说,同学们对于力的独立作用原理都很清楚,但是对于梁局部变形与总体位移之间的几何关系,理解起来就比较模糊了.另外,教师在介绍逐段分析求和法时,往往偏重于该方法的具体应用[8 ] ,忽略对这种方法的力学本质的分析,以至于同学们很容易认为这是一种全新的方法,并只注重采用这种方法做习题,而不去思考该方法背后的思想和原理.本文试图从钓鱼竿这一生活中的实例入手,通过对钓鱼竿的变形分析自然引入逐段分析求和法,并由变形分析导出具体计算时采用的方法,即逐段刚化法或逐段软化法.进而讨论应用逐段分析求和法的前提条件,以及其与叠加法的本质区别.最后,通过从离散逐步逼近连续的数学思想,阐明逐段分析求和法与积分法的内在联系. ...
... [2 ].第三种是将该方法统一归于梁变形计算的叠加法一节,并明确指出逐段分析求和法与叠加法的理论基础其实并不相同,叠加法的理论基础是力的独立作用原理,而逐段分析求和法的理论基础是梁局部变形与总体位移之间的几何关系[1 ,3 ] ,但未说明这个几何关系到底是什么,以及这种几何关系与具体应用时的方法是怎样联系起来的.一般来说,同学们对于力的独立作用原理都很清楚,但是对于梁局部变形与总体位移之间的几何关系,理解起来就比较模糊了.另外,教师在介绍逐段分析求和法时,往往偏重于该方法的具体应用[8 ] ,忽略对这种方法的力学本质的分析,以至于同学们很容易认为这是一种全新的方法,并只注重采用这种方法做习题,而不去思考该方法背后的思想和原理.本文试图从钓鱼竿这一生活中的实例入手,通过对钓鱼竿的变形分析自然引入逐段分析求和法,并由变形分析导出具体计算时采用的方法,即逐段刚化法或逐段软化法.进而讨论应用逐段分析求和法的前提条件,以及其与叠加法的本质区别.最后,通过从离散逐步逼近连续的数学思想,阐明逐段分析求和法与积分法的内在联系. ...
... 图4 (a)中,$A_{2}A_{1}$段视为刚体,在这种情况下$A_{0}$截面的挠度仅包含$A_{1}A_{0}$段的变形效果.图4 (b)中,$A_{1}A_{0}$段视为刚体,此时,$A_{0}$截面的挠度仅包含$A_{2}A_{1}$段的变形效果.这一方法被称为逐段刚化法[2 ] ,也有教材称之为逐段软化法[3 ] .这两种名称都比较直观形象,易于理解,只是各自的参考构型不同而已.逐段刚化法是以弹性梁为参考构型,通过刚化其他段来分析某一段的变形效果,而逐段软化法是以刚性梁为参考构型,通过软化某一段来求该段的变形效果. ...
3
2019
... 逐段分析求和法[1 ] (或称为逐段刚化法[2 ] 或逐段软化法[3 ] )是梁变形计算中的一种重要方法.现有材料力学教材关于该方法的介绍主要有三种方式,第一种是只明确提出叠加法而不提逐段分析求和法[4 -7 ] ,仅把逐段分析求和法作为叠加法的一种实现方法.第二种是两种方法都明确提出来,但是对于这种方法的来源以及理论基础没有详细说明[2 ] .第三种是将该方法统一归于梁变形计算的叠加法一节,并明确指出逐段分析求和法与叠加法的理论基础其实并不相同,叠加法的理论基础是力的独立作用原理,而逐段分析求和法的理论基础是梁局部变形与总体位移之间的几何关系[1 ,3 ] ,但未说明这个几何关系到底是什么,以及这种几何关系与具体应用时的方法是怎样联系起来的.一般来说,同学们对于力的独立作用原理都很清楚,但是对于梁局部变形与总体位移之间的几何关系,理解起来就比较模糊了.另外,教师在介绍逐段分析求和法时,往往偏重于该方法的具体应用[8 ] ,忽略对这种方法的力学本质的分析,以至于同学们很容易认为这是一种全新的方法,并只注重采用这种方法做习题,而不去思考该方法背后的思想和原理.本文试图从钓鱼竿这一生活中的实例入手,通过对钓鱼竿的变形分析自然引入逐段分析求和法,并由变形分析导出具体计算时采用的方法,即逐段刚化法或逐段软化法.进而讨论应用逐段分析求和法的前提条件,以及其与叠加法的本质区别.最后,通过从离散逐步逼近连续的数学思想,阐明逐段分析求和法与积分法的内在联系. ...
... [2 ].第三种是将该方法统一归于梁变形计算的叠加法一节,并明确指出逐段分析求和法与叠加法的理论基础其实并不相同,叠加法的理论基础是力的独立作用原理,而逐段分析求和法的理论基础是梁局部变形与总体位移之间的几何关系[1 ,3 ] ,但未说明这个几何关系到底是什么,以及这种几何关系与具体应用时的方法是怎样联系起来的.一般来说,同学们对于力的独立作用原理都很清楚,但是对于梁局部变形与总体位移之间的几何关系,理解起来就比较模糊了.另外,教师在介绍逐段分析求和法时,往往偏重于该方法的具体应用[8 ] ,忽略对这种方法的力学本质的分析,以至于同学们很容易认为这是一种全新的方法,并只注重采用这种方法做习题,而不去思考该方法背后的思想和原理.本文试图从钓鱼竿这一生活中的实例入手,通过对钓鱼竿的变形分析自然引入逐段分析求和法,并由变形分析导出具体计算时采用的方法,即逐段刚化法或逐段软化法.进而讨论应用逐段分析求和法的前提条件,以及其与叠加法的本质区别.最后,通过从离散逐步逼近连续的数学思想,阐明逐段分析求和法与积分法的内在联系. ...
... 图4 (a)中,$A_{2}A_{1}$段视为刚体,在这种情况下$A_{0}$截面的挠度仅包含$A_{1}A_{0}$段的变形效果.图4 (b)中,$A_{1}A_{0}$段视为刚体,此时,$A_{0}$截面的挠度仅包含$A_{2}A_{1}$段的变形效果.这一方法被称为逐段刚化法[2 ] ,也有教材称之为逐段软化法[3 ] .这两种名称都比较直观形象,易于理解,只是各自的参考构型不同而已.逐段刚化法是以弹性梁为参考构型,通过刚化其他段来分析某一段的变形效果,而逐段软化法是以刚性梁为参考构型,通过软化某一段来求该段的变形效果. ...
3
2016
... 逐段分析求和法[1 ] (或称为逐段刚化法[2 ] 或逐段软化法[3 ] )是梁变形计算中的一种重要方法.现有材料力学教材关于该方法的介绍主要有三种方式,第一种是只明确提出叠加法而不提逐段分析求和法[4 -7 ] ,仅把逐段分析求和法作为叠加法的一种实现方法.第二种是两种方法都明确提出来,但是对于这种方法的来源以及理论基础没有详细说明[2 ] .第三种是将该方法统一归于梁变形计算的叠加法一节,并明确指出逐段分析求和法与叠加法的理论基础其实并不相同,叠加法的理论基础是力的独立作用原理,而逐段分析求和法的理论基础是梁局部变形与总体位移之间的几何关系[1 ,3 ] ,但未说明这个几何关系到底是什么,以及这种几何关系与具体应用时的方法是怎样联系起来的.一般来说,同学们对于力的独立作用原理都很清楚,但是对于梁局部变形与总体位移之间的几何关系,理解起来就比较模糊了.另外,教师在介绍逐段分析求和法时,往往偏重于该方法的具体应用[8 ] ,忽略对这种方法的力学本质的分析,以至于同学们很容易认为这是一种全新的方法,并只注重采用这种方法做习题,而不去思考该方法背后的思想和原理.本文试图从钓鱼竿这一生活中的实例入手,通过对钓鱼竿的变形分析自然引入逐段分析求和法,并由变形分析导出具体计算时采用的方法,即逐段刚化法或逐段软化法.进而讨论应用逐段分析求和法的前提条件,以及其与叠加法的本质区别.最后,通过从离散逐步逼近连续的数学思想,阐明逐段分析求和法与积分法的内在联系. ...
... ,3 ],但未说明这个几何关系到底是什么,以及这种几何关系与具体应用时的方法是怎样联系起来的.一般来说,同学们对于力的独立作用原理都很清楚,但是对于梁局部变形与总体位移之间的几何关系,理解起来就比较模糊了.另外,教师在介绍逐段分析求和法时,往往偏重于该方法的具体应用[8 ] ,忽略对这种方法的力学本质的分析,以至于同学们很容易认为这是一种全新的方法,并只注重采用这种方法做习题,而不去思考该方法背后的思想和原理.本文试图从钓鱼竿这一生活中的实例入手,通过对钓鱼竿的变形分析自然引入逐段分析求和法,并由变形分析导出具体计算时采用的方法,即逐段刚化法或逐段软化法.进而讨论应用逐段分析求和法的前提条件,以及其与叠加法的本质区别.最后,通过从离散逐步逼近连续的数学思想,阐明逐段分析求和法与积分法的内在联系. ...
... 图4 (a)中,$A_{2}A_{1}$段视为刚体,在这种情况下$A_{0}$截面的挠度仅包含$A_{1}A_{0}$段的变形效果.图4 (b)中,$A_{1}A_{0}$段视为刚体,此时,$A_{0}$截面的挠度仅包含$A_{2}A_{1}$段的变形效果.这一方法被称为逐段刚化法[2 ] ,也有教材称之为逐段软化法[3 ] .这两种名称都比较直观形象,易于理解,只是各自的参考构型不同而已.逐段刚化法是以弹性梁为参考构型,通过刚化其他段来分析某一段的变形效果,而逐段软化法是以刚性梁为参考构型,通过软化某一段来求该段的变形效果. ...
3
2016
... 逐段分析求和法[1 ] (或称为逐段刚化法[2 ] 或逐段软化法[3 ] )是梁变形计算中的一种重要方法.现有材料力学教材关于该方法的介绍主要有三种方式,第一种是只明确提出叠加法而不提逐段分析求和法[4 -7 ] ,仅把逐段分析求和法作为叠加法的一种实现方法.第二种是两种方法都明确提出来,但是对于这种方法的来源以及理论基础没有详细说明[2 ] .第三种是将该方法统一归于梁变形计算的叠加法一节,并明确指出逐段分析求和法与叠加法的理论基础其实并不相同,叠加法的理论基础是力的独立作用原理,而逐段分析求和法的理论基础是梁局部变形与总体位移之间的几何关系[1 ,3 ] ,但未说明这个几何关系到底是什么,以及这种几何关系与具体应用时的方法是怎样联系起来的.一般来说,同学们对于力的独立作用原理都很清楚,但是对于梁局部变形与总体位移之间的几何关系,理解起来就比较模糊了.另外,教师在介绍逐段分析求和法时,往往偏重于该方法的具体应用[8 ] ,忽略对这种方法的力学本质的分析,以至于同学们很容易认为这是一种全新的方法,并只注重采用这种方法做习题,而不去思考该方法背后的思想和原理.本文试图从钓鱼竿这一生活中的实例入手,通过对钓鱼竿的变形分析自然引入逐段分析求和法,并由变形分析导出具体计算时采用的方法,即逐段刚化法或逐段软化法.进而讨论应用逐段分析求和法的前提条件,以及其与叠加法的本质区别.最后,通过从离散逐步逼近连续的数学思想,阐明逐段分析求和法与积分法的内在联系. ...
... ,3 ],但未说明这个几何关系到底是什么,以及这种几何关系与具体应用时的方法是怎样联系起来的.一般来说,同学们对于力的独立作用原理都很清楚,但是对于梁局部变形与总体位移之间的几何关系,理解起来就比较模糊了.另外,教师在介绍逐段分析求和法时,往往偏重于该方法的具体应用[8 ] ,忽略对这种方法的力学本质的分析,以至于同学们很容易认为这是一种全新的方法,并只注重采用这种方法做习题,而不去思考该方法背后的思想和原理.本文试图从钓鱼竿这一生活中的实例入手,通过对钓鱼竿的变形分析自然引入逐段分析求和法,并由变形分析导出具体计算时采用的方法,即逐段刚化法或逐段软化法.进而讨论应用逐段分析求和法的前提条件,以及其与叠加法的本质区别.最后,通过从离散逐步逼近连续的数学思想,阐明逐段分析求和法与积分法的内在联系. ...
... 图4 (a)中,$A_{2}A_{1}$段视为刚体,在这种情况下$A_{0}$截面的挠度仅包含$A_{1}A_{0}$段的变形效果.图4 (b)中,$A_{1}A_{0}$段视为刚体,此时,$A_{0}$截面的挠度仅包含$A_{2}A_{1}$段的变形效果.这一方法被称为逐段刚化法[2 ] ,也有教材称之为逐段软化法[3 ] .这两种名称都比较直观形象,易于理解,只是各自的参考构型不同而已.逐段刚化法是以弹性梁为参考构型,通过刚化其他段来分析某一段的变形效果,而逐段软化法是以刚性梁为参考构型,通过软化某一段来求该段的变形效果. ...
1
1992
... 逐段分析求和法[1 ] (或称为逐段刚化法[2 ] 或逐段软化法[3 ] )是梁变形计算中的一种重要方法.现有材料力学教材关于该方法的介绍主要有三种方式,第一种是只明确提出叠加法而不提逐段分析求和法[4 -7 ] ,仅把逐段分析求和法作为叠加法的一种实现方法.第二种是两种方法都明确提出来,但是对于这种方法的来源以及理论基础没有详细说明[2 ] .第三种是将该方法统一归于梁变形计算的叠加法一节,并明确指出逐段分析求和法与叠加法的理论基础其实并不相同,叠加法的理论基础是力的独立作用原理,而逐段分析求和法的理论基础是梁局部变形与总体位移之间的几何关系[1 ,3 ] ,但未说明这个几何关系到底是什么,以及这种几何关系与具体应用时的方法是怎样联系起来的.一般来说,同学们对于力的独立作用原理都很清楚,但是对于梁局部变形与总体位移之间的几何关系,理解起来就比较模糊了.另外,教师在介绍逐段分析求和法时,往往偏重于该方法的具体应用[8 ] ,忽略对这种方法的力学本质的分析,以至于同学们很容易认为这是一种全新的方法,并只注重采用这种方法做习题,而不去思考该方法背后的思想和原理.本文试图从钓鱼竿这一生活中的实例入手,通过对钓鱼竿的变形分析自然引入逐段分析求和法,并由变形分析导出具体计算时采用的方法,即逐段刚化法或逐段软化法.进而讨论应用逐段分析求和法的前提条件,以及其与叠加法的本质区别.最后,通过从离散逐步逼近连续的数学思想,阐明逐段分析求和法与积分法的内在联系. ...
1
1992
... 逐段分析求和法[1 ] (或称为逐段刚化法[2 ] 或逐段软化法[3 ] )是梁变形计算中的一种重要方法.现有材料力学教材关于该方法的介绍主要有三种方式,第一种是只明确提出叠加法而不提逐段分析求和法[4 -7 ] ,仅把逐段分析求和法作为叠加法的一种实现方法.第二种是两种方法都明确提出来,但是对于这种方法的来源以及理论基础没有详细说明[2 ] .第三种是将该方法统一归于梁变形计算的叠加法一节,并明确指出逐段分析求和法与叠加法的理论基础其实并不相同,叠加法的理论基础是力的独立作用原理,而逐段分析求和法的理论基础是梁局部变形与总体位移之间的几何关系[1 ,3 ] ,但未说明这个几何关系到底是什么,以及这种几何关系与具体应用时的方法是怎样联系起来的.一般来说,同学们对于力的独立作用原理都很清楚,但是对于梁局部变形与总体位移之间的几何关系,理解起来就比较模糊了.另外,教师在介绍逐段分析求和法时,往往偏重于该方法的具体应用[8 ] ,忽略对这种方法的力学本质的分析,以至于同学们很容易认为这是一种全新的方法,并只注重采用这种方法做习题,而不去思考该方法背后的思想和原理.本文试图从钓鱼竿这一生活中的实例入手,通过对钓鱼竿的变形分析自然引入逐段分析求和法,并由变形分析导出具体计算时采用的方法,即逐段刚化法或逐段软化法.进而讨论应用逐段分析求和法的前提条件,以及其与叠加法的本质区别.最后,通过从离散逐步逼近连续的数学思想,阐明逐段分析求和法与积分法的内在联系. ...
1
2001
... 逐段分析求和法[1 ] (或称为逐段刚化法[2 ] 或逐段软化法[3 ] )是梁变形计算中的一种重要方法.现有材料力学教材关于该方法的介绍主要有三种方式,第一种是只明确提出叠加法而不提逐段分析求和法[4 -7 ] ,仅把逐段分析求和法作为叠加法的一种实现方法.第二种是两种方法都明确提出来,但是对于这种方法的来源以及理论基础没有详细说明[2 ] .第三种是将该方法统一归于梁变形计算的叠加法一节,并明确指出逐段分析求和法与叠加法的理论基础其实并不相同,叠加法的理论基础是力的独立作用原理,而逐段分析求和法的理论基础是梁局部变形与总体位移之间的几何关系[1 ,3 ] ,但未说明这个几何关系到底是什么,以及这种几何关系与具体应用时的方法是怎样联系起来的.一般来说,同学们对于力的独立作用原理都很清楚,但是对于梁局部变形与总体位移之间的几何关系,理解起来就比较模糊了.另外,教师在介绍逐段分析求和法时,往往偏重于该方法的具体应用[8 ] ,忽略对这种方法的力学本质的分析,以至于同学们很容易认为这是一种全新的方法,并只注重采用这种方法做习题,而不去思考该方法背后的思想和原理.本文试图从钓鱼竿这一生活中的实例入手,通过对钓鱼竿的变形分析自然引入逐段分析求和法,并由变形分析导出具体计算时采用的方法,即逐段刚化法或逐段软化法.进而讨论应用逐段分析求和法的前提条件,以及其与叠加法的本质区别.最后,通过从离散逐步逼近连续的数学思想,阐明逐段分析求和法与积分法的内在联系. ...
材料力学中逐段刚化法的灵活应用
1
1998
... 逐段分析求和法[1 ] (或称为逐段刚化法[2 ] 或逐段软化法[3 ] )是梁变形计算中的一种重要方法.现有材料力学教材关于该方法的介绍主要有三种方式,第一种是只明确提出叠加法而不提逐段分析求和法[4 -7 ] ,仅把逐段分析求和法作为叠加法的一种实现方法.第二种是两种方法都明确提出来,但是对于这种方法的来源以及理论基础没有详细说明[2 ] .第三种是将该方法统一归于梁变形计算的叠加法一节,并明确指出逐段分析求和法与叠加法的理论基础其实并不相同,叠加法的理论基础是力的独立作用原理,而逐段分析求和法的理论基础是梁局部变形与总体位移之间的几何关系[1 ,3 ] ,但未说明这个几何关系到底是什么,以及这种几何关系与具体应用时的方法是怎样联系起来的.一般来说,同学们对于力的独立作用原理都很清楚,但是对于梁局部变形与总体位移之间的几何关系,理解起来就比较模糊了.另外,教师在介绍逐段分析求和法时,往往偏重于该方法的具体应用[8 ] ,忽略对这种方法的力学本质的分析,以至于同学们很容易认为这是一种全新的方法,并只注重采用这种方法做习题,而不去思考该方法背后的思想和原理.本文试图从钓鱼竿这一生活中的实例入手,通过对钓鱼竿的变形分析自然引入逐段分析求和法,并由变形分析导出具体计算时采用的方法,即逐段刚化法或逐段软化法.进而讨论应用逐段分析求和法的前提条件,以及其与叠加法的本质区别.最后,通过从离散逐步逼近连续的数学思想,阐明逐段分析求和法与积分法的内在联系. ...
逐段变形效应叠加法的能量法证明及其推广
1
2004
... 通过比较图4 与图3 (b),还可以得到应用逐段分析求和法的前提条件.也就是说,在何种情况下,图3 (b)所示梁的变形与图4 所示两种变形效果的总和是相等的.很显然,只有在原始构型下进行受力和变形分析时,这种变形分解才成立.因此,小变形条件是逐段分析求和法的前提条件.需要说明的是,逐段分析求和法并没有线弹性的限制条件.从图4 可以看出,这个分解过程完全是基于变形几何的,与材料的物理特性无关.这是逐段分析求和法与叠加法的本质区别.关于这一点,文献[9 ]从能量法的角度进行了相关讨论.此处结合一个具体例子进行简单说明. ...
逐段变形效应叠加法的能量法证明及其推广
1
2004
... 通过比较图4 与图3 (b),还可以得到应用逐段分析求和法的前提条件.也就是说,在何种情况下,图3 (b)所示梁的变形与图4 所示两种变形效果的总和是相等的.很显然,只有在原始构型下进行受力和变形分析时,这种变形分解才成立.因此,小变形条件是逐段分析求和法的前提条件.需要说明的是,逐段分析求和法并没有线弹性的限制条件.从图4 可以看出,这个分解过程完全是基于变形几何的,与材料的物理特性无关.这是逐段分析求和法与叠加法的本质区别.关于这一点,文献[9 ]从能量法的角度进行了相关讨论.此处结合一个具体例子进行简单说明. ...









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}