舰载机在返回航母时,由于航空母舰上飞行甲板长度有限,无法满足舰载机着舰要求,所以需要配置拦阻装置。拦阻装置分为拦阻索装置和拦阻网装置。拦阻网装置仅应用于拦阻索拦阻失败且无法满足舰载机复飞的紧急情况,对舰载机会造成一定的损伤。拦阻索装置一般配置4道拦阻索,拦阻索一端连接拦阻机,另一端连接舰载机,使舰载机受到拦阻力能够在安全距离内制动。
在拦阻过程中,拦阻索是舰载机是否安全拦停的关键,因此对于拦阻索的力学特性研究是不可或缺的环节。近年来,大量研究考虑拦阻索质量和惯性,研究拦阻过程中的弯折波现象。罗青等[1 ] 建立了考虑前三重弯折波的拦阻数学模型,研究舰载机在不同着陆重量与不同啮合速度组合下着舰时的钩载随时间以及冲程的变化规律;李启明等[2 ] 建立了拦阻过程动力学模型,对应力波在拦阻索/尼龙带中的传播及作用进行了研究;张萍等[3 ] 研究了考虑弯折波的舰载机拦阻过程的控制问题,验证了拦阻索中应力的传播对拦阻过程的影响;谢朋朋等[4 ] 建立了考虑前三重弯折波的偏心拦阻模型,研究偏心度对舰载机拦阻过程的安全特性的影响;梁利华等[5 ] 将拦阻索离散为具有弹性和阻尼特性的单自由度梁单元,建立了拦阻系统的碰撞动力学模型,研究拦阻索中的应力波;彭一明等[6 ] 建立了偏航着舰时拦阻钩上转和横摆动力学模型,研究和分析了偏航拦阻前期的弯折波现象及其对拦阻过程的影响;Xu等[7 ] 建立了三维拦阻的数学模型,考虑了空间中的弯折波,并对模型进行了数值仿真。上述研究大多对弯折波进行了简化处理,认为弯折波是从钩索结合点向甲板滑轮单向传递的,且只考虑了前三重弯折波的影响。
本文考虑拦阻全程的弯折波,同时实现弯折波在甲板滑轮与钩索结合点之间来回传递,建立了拦阻索离散模型。对拦阻过程进行数值仿真,研究弯折波对舰载机位移、速度、加速度、拦阻索拉力、拉力角等的影响。
1 舰载机拦阻系统简化
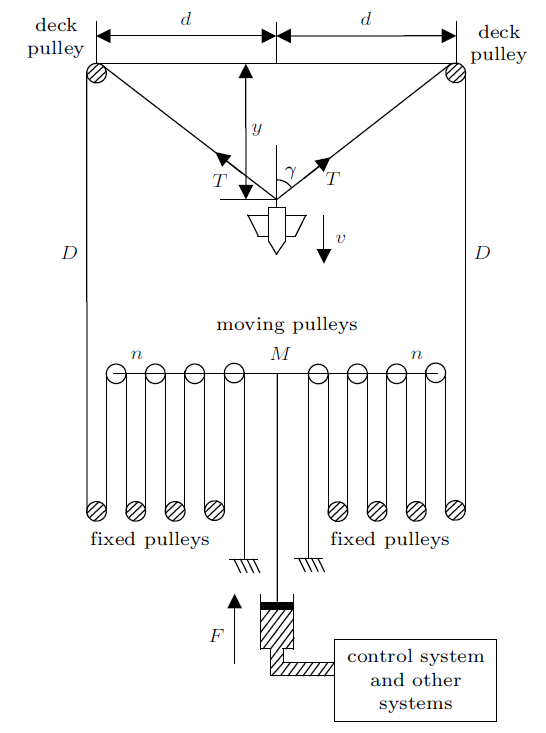
舰载机拦阻系统如图1 所示。舰载机的速度为$v$,位移为$y$。拦阻索绕过甲板滑轮,与总质量为$M$的动滑轮组相连,单侧拦阻索总长为$D$,单侧动滑轮个数为$n$,两甲板滑轮间距半长为$d$,动滑轮组受液压阻尼力$F$作用,拦阻索拉力角$\gamma$为单侧拦阻索作用在舰载机上的拉力$T$与舰载机位移方向的夹角。
图1
图1
舰载机拦阻系统
Fig.1
Arresting system of carrier aircraft
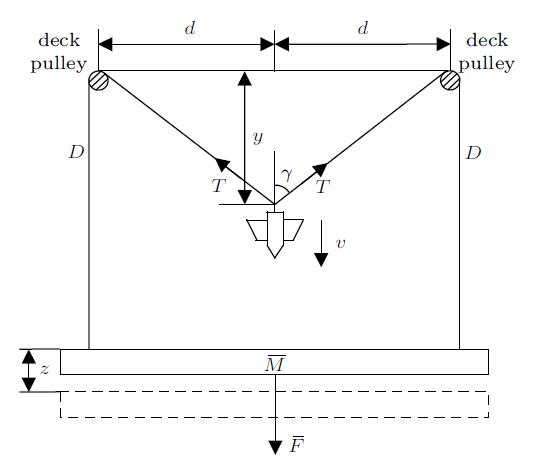
将拦阻系统简化,如图2 所示。动滑轮组等效物的质量为$\overline{{M}}$,位移为$z$,受到等效液压阻尼力$\overline{{F}}$作用。为了保证拦阻索释放状态相同,动滑轮组的加速度$\ddot{{x}}$和动滑轮组等效物的加速度$\ddot{{z}}$满足关系为
(1) $\ddot{{z}}=2n\ddot{{x}}$
图2
图2
拦阻系统简化模型
Fig.2
Simplified model of arresting system
不考虑弯折波,以舰载机、动滑轮组和动滑轮组等效物为研究对象,建立系统的动力学方程。舰载机的质量为$m$,在拦阻过程中受到拦阻钩载荷$H$,发动机推力$F_{\rm T}$,甲板摩檫力$F_{\rm f}$和气动阻力$F_{\rm d}$的作用。根据牛顿定律,对于舰载机,有
(2) $m\ddot{{y}}=F_{\rm T} -H-F_{{\rm f}} -F_{{\rm d}}$
式中, $H=2T\cos \gamma $,$F_{{\rm f}} =k_{1}mg$,$F_{{\rm d}} =k_{2}\dot{{y}}^{2}$。$k_{1}$和$k_{2}$分别为摩擦因数和气动阻力因数。
(3) $M\ddot{{x}}=4nT-F$
(4) $\overline{{M}}\ddot{{z}}=2T-\overline{{F}}$
(5) $\left. {\begin{array}{ccc} \overline{{M}}&=&\dfrac{M}{4n^{2}} \\ \overline{{F}}&=&\dfrac{F}{2n} \\ \end{array}} \right\}$
根据几何关系有$\cos \gamma =y/\sqrt {d^{2}+y^{2}}$。对于拦阻索线弹性应变问题,根据胡克定律,有
(6) $T=\frac{Eq}{D}\varDelta$
式中,$E$为拦阻索的弹性模量,$q$为拦阻索的横截面积,拦阻索伸长量$\varDelta =\sqrt{d^{2}+y^{2}} -d-z$。
2 拦阻索建模
2.1 拦阻索离散模型
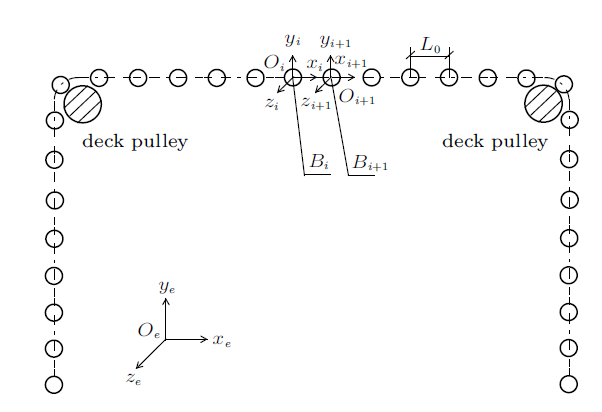
考虑拦阻索的质量和惯性,将拦阻索离散为柔性力连接的若干质量,如图3 所示。
图3
图3
拦阻索离散模型
Fig.3
Discretized model of arresting cable
定义坐标系如下:大地坐标系$O_{e} x_{e} y_{e} z_{e} $和离散质量坐标系$O_{i}x_{i} y_{i} z_{i} $,其中离散质量$B_{i} $的集中质量位置$O_{i} $相对$O_{e}$的位置$r_{i} =(r_{ix},r_{iy},r_{iz} )^{\rm T}$;$x_{i}$为沿拦阻索轴线方向,$y_{i} $和$z_{i}$为垂直于拦阻索轴线的两个方向,以卡尔丹角坐标为姿态坐标表示$O_{i} x_{i}y_{i} z_{i} $相对$O_{e} x_{e} y_{e} z_{e} $的姿态,$\theta_{i} =(\theta_{ix},\theta_{iy},\theta_{iz} )^{\rm T}$。则离散质量$B_{i}$的位形坐标阵为
(7) $q_{i} =(r_{i}^{\rm T}, \theta_{i}^{\rm T})^{\rm T}=(r_{ix},r_{iy},r_{iz},\theta_{ix},\theta_{iy},\theta_{iz} )^{\rm T}$
离散质量之间的间距为$L_{0}$,则离散质量$B_{i} $的质量和惯量为
(8) $ \left. {\begin{array}{l} m_{i} =\rho qL_{0} \\ J_{ix} =\dfrac{1}{2}m_{i} r^{2} \\ J_{iy} =J_{iz} =\dfrac{1}{4}m_{i} \left( {r^{2}+\dfrac{L_{0}^{2}}{3}} \right) \\ \end{array}} \right\} $
式中,$r$为拦阻索半径,$\rho $为拦阻索密度。
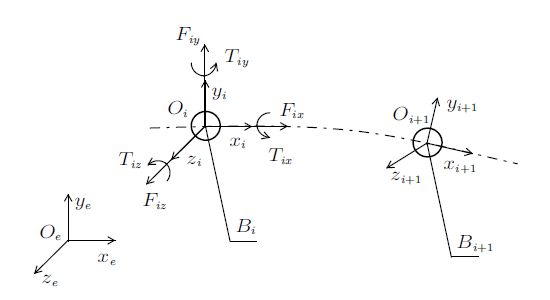
$B_{i+1} $对$B_{i} $的柔性力$F_{i} $如图4 所示,$B_{i} $对$B_{i+1}$的柔性力$F_{i}^{\prime }=-F_{i} $,$F_{i} $和$F_{i}^{\prime}$均是基于$O_{i} x_{i} y_{i} z_{i} $下的表达。
图4
图4
$B_{i+1} $对$B_{i} $的柔性力
Fig.4
Flexible force of $B_{i+1} $ to $B_{i}$
本文基于Euler-Bernoulli非线性梁理论来描述拦阻索的大变形几何非线性问题,柔性力$F_{i}=(F_{ix},F_{iy},F_{iz},T_{ix},T_{iy},T_{iz} )^{\rm T}$,具体表示为
(9) $F_{i} =F_{i}^{0} -F_{ix}^{0} BQ_{i}$
(10) $ \boldsymbol{B}=\left[\begin{array}{cccccc}0 & 0 & 0 & 0 & 0 & 0 \\0 & \frac{6}{5 L_{0}} & 0 & 0 & 0 & -\frac{1}{10} \\0 & 0 & \frac{6}{5 L_{0}} & 0 & -\frac{1}{10} & 0 \\0 & 0 & 0 & 0 & 0 & 0 \\0 & 0 & -\frac{1}{10} & 0 & \frac{2 L_{0}}{15} & 0 \\0 & -\frac{1}{10} & 0 & 0 & 0 & \frac{2 L_{0}}{15}\end{array}\right] $
(11) $ Q_{i}=\left[\begin{array}{cc}A_{i}^{-1} & 0 \\0 & A_{i}^{-1}\end{array}\right]\left(\boldsymbol{q}_{i}-\boldsymbol{q}_{i+1}\right)-\left[\begin{array}{c}L_{0} \\0 \\0 \\0 \\0 \\0\end{array}\right] $
式中,$A_{i} $为$O_{i} x_{i} y_{i} z_{i} $关于$O_{e} x_{e} y_{e} z_{e}$的方向余弦矩阵。
$F_{i}^{0} =(F_{ix}^{0},F_{iy}^{0},F_{iz}^{0},T_{ix}^{0},T_{iy}^{0},T_{iz}^{0} )^{\rm T}$,具体表示为
(12) $ \boldsymbol{F}_{i}^{0}=-\boldsymbol{K} \boldsymbol{Q}_{i}-\boldsymbol{C} \boldsymbol{V}_{i} $
(13) $ \boldsymbol{V}_{i}=\left[\begin{array}{cc}\boldsymbol{A}_{i}^{-1} & \mathbf{0} \\\mathbf{0} & \boldsymbol{A}_{i}^{-1}\end{array}\right]\left[\dot{\boldsymbol{q}}_{i}-\dot{\boldsymbol{q}}_{i+1}\right] $
式中,$K$和$C$分别为刚度系数矩阵和阻尼系数矩阵,具体表示为
(14) $\boldsymbol{K}=\left[\begin{array}{cccccc}K_{11} & 0 & 0 & 0 & 0 & 0 \\0 & K_{22} & 0 & 0 & 0 & K_{26} \\0 & 0 & K_{33} & 0 & K_{35} & 0 \\0 & 0 & 0 & K_{44} & 0 & 0 \\0 & 0 & K_{53} & 0 & K_{55} & 0 \\0 & K_{62} & 0 & 0 & 0 & K_{66}\end{array}\right]$
(15) $C=CK$
式中,$C$为阻尼与刚度的比,与刚度相乘用来描述阻尼。
(16) $\left.\begin{array}{l}K_{11}=E q / L_{0} \\K_{22}=\left\{12 E I_{z z} /\left[L_{0}^{3}\left(1+P_{y}\right)\right]\right\} R_{k b} \\K_{33}=\left\{12 E I_{y y} /\left[L_{0}^{3}\left(1+P_{z}\right)\right]\right\} R_{k b} \\K_{44}=\left[G I_{x x} / L_{0}\right] R_{k t} \\K_{55}=\left\{\left(4+P_{z}\right) E I_{y y} /\left[L_{0}\left(1+P_{z}\right)\right]\right\} R_{k b} \\K_{66}=\left\{\left(4+P_{y}\right) E I_{z z} /\left[L_{0}\left(1+P_{y}\right)\right]\right\} R_{k b} \\K_{26}=K_{62}=\left\{-6 E I_{z z} /\left[L_{0}^{2}\left(1+P_{y}\right)\right]\right\} R_{k b} \\K_{35}=K_{53}=\left\{6 E I_{y y} /\left[L_{0}^{2}\left(1+P_{z}\right)\right]\right\} R_{k b}\end{array}\right\}$
(17) $\left.\begin{array}{l}I_{x x}=\frac{\pi}{2} r^{4} \\I_{y y}=I_{z z}=\frac{\pi}{4} r^{4} \\P_{y}=12 E I_{z z} A S Y /\left(G q L_{0}^{2}\right) \\P_{z}=12 E I_{y y} A S Z /\left(G q L_{0}^{2}\right)\end{array}\right\}$
式中,$I_{xx}$,$I_{yy}$,$I_{zz}$分别为拦阻索截面极惯性矩、拦阻索截面对中性轴$y$及$z$的惯性矩;$P_{y}$和$P_{z}$分别为$y$方向和$z$方向对刚度的影响因子。$E$和$G$分别表示拦阻索的弹性模量和剪切弹性模量;$R_{kb} $和$R_{kt}$分别为弯曲刚度乘子和扭转刚度乘子;$ASY$和$ASZ$分别为$y$方向和$z$方向上的剪切修正因子,与拦阻索截面形状有关,根据文献[8 ] ,实心圆截面取$ASY =ASZ=10/9$。
2.2 理想弯折波分析
半无限长的弹性索受到垂直弹性索方向上速度为$v_{0}$的冲击,会使弹性索发生弯折,这种弯折在弹性索中传递,称为理想弯折波。弹性索中传递的纵波和横波在弹性索质点移动下形成直观可见的弯折波。
在研究弹性索中的纵波时,可认为弹性索处于一维应力状态,有初始应力的一维应力问题下的纵波波速为
(18) $ c=\sqrt {\left( {1+\dfrac{\sigma_{0} }{E}} \right)\frac{E}{\rho }} $
式中,$\sigma_{0}$为弹性索初始应力,$\rho$为弹性索密度,$E$为弹性索弹性模量。
文献[9 ] 用拉格朗日方法研究了横波的传递,给出了一维应力状态下横波波速$\overline{c}$的表达式为
(19) $ \overline{{c}}=\sqrt {\dfrac{1}{\rho_{1} }\dfrac{T_{1} }{1+\varepsilon_{1} }} $
式中,弹性索线密度$\rho_{1}= \rho q$;横波传递后的弹性索拉力$T_{1}= \sigma q$;$\varepsilon _{1}$为横波传递后以初始弹性索为原长下的弹性索应变,其与横波传递后弹性索应力$\sigma$的关系为
(20) $ 1+\varepsilon_{1} =\frac{1+{\sigma }/{E}}{1+{\sigma_{0} }/{E}} $
(21) $ \overline{{c}}=\sqrt {\frac{\sigma \left( {1+{\sigma_{0} }/{E}} \right)}{\rho \left( 1+{\sigma }/{E} \right)}} $
由于波的传递导致弹性索上应力不等,弹性索质点产生了移动,其移动速度[1 ] 为
(22) $ u=\dfrac{\dfrac{\sigma -\sigma_{0} }{E}}{1+{\sigma_{0}}/{E}}c $
在弹性索上,纵波、横波与弹性索质点移动的共同作用决定了弯折波波速[1 ] 为
(23) $ w=\overline{{c}}-u\left( {1-\frac{\overline{{c}}}{c}} \right) $
当弹性索的初始应力为零时,简化后的弯折波波速[3 ] 为
(24) $w=c\left[\left(\frac{1}{2}\right)^{\frac{1}{3}}\left(\frac{v_{0}}{c}\right)^{\frac{2}{3}}-\left(\frac{1}{2}\right)^{\frac{2}{3}}\left(\frac{v_{0}}{c}\right)^{\frac{4}{3}}\right]$
2.3 离散模型的验证
现假设有一弹性索长度为400 m,两端自由。材料的密度$\rho = 9332$ kg/m$^{3}$,横截面积$q = 480$ mm$^{2}$,弹性模量$E = 88$ GPa,剪切弹性模量$G =35.2$ GPa。根据2.1节内容将其离散为若干质量,离散质量之间的间距$L_{0}=0.1$ m。
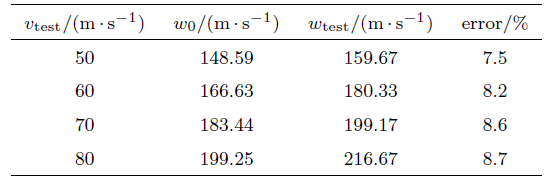
在弹性索中间施加垂直弹性索方向上速度大小恒定为$v_{\rm test}$的冲击,分别取$v_{\rm test}= 50$ m/s, 60 m/s, 70 m/s, 80 m/s。根据式(18)确定纵波波速$c =$ 3071 m/s,则纵波从弹性索中间传递到弹性索两端的时间为0.065 s。在纵波第一次到达端点前,该弹性索可视为无限长状态,弯折波波速的理论值$w_{0}$可根据式(24)求得。取仿真时间为0.06 s,仿真结束时,测量弹性索弯折距离,即可算出仿真得到的弯折波波速$w_{\rm test}$。弯折波波速的理论值与仿真值如表1 所示,可见根据上述离散模型仿真得到的弯折波波速与理论值的相对误差小于10%,证明了上述离散模型的正确性。存在误差的主要原因是弯折波波速的理论值是在不考虑弹性索弯曲刚度的理想情况下的波速,而离散模型与实际相符,考虑了弹性索弯曲刚度的影响,弹性索弯曲刚度的存在,使得离散模型仿真得到的弯折波波速比理论值大。
3 舰载机拦阻过程仿真分析
3.1 舰载机拦阻参数
本文假设舰载机的拦阻参数为:舰载机质量$m = 22 680$ kg,初始拦阻速度$v_{0} =69.4$ m/s;拦阻索密度$\rho = 9332$ kg/m$^{3}$,横截面积$q = 480$ mm$^{2}$,弹性模量$E = 88$ GPa,剪切弹性模量$G = 35.2$ GPa;单侧拦阻索总长$D =110$ m,两甲板滑轮间距半长$d = 15$ m,动滑轮组总质量$M = 6519$ kg,单侧动滑轮个数$n = 9$。参考文献[10 ],假设发动机推力$F_{T} =0.4mg$,摩擦因数$k_{1} = 0.017$,气动阻力因数$k_{2} = (0.526+0.000 105mg)$ N $\cdot$ $s^{2}/m^{2}$。根据2.1节内容将拦阻索离散为若干质量,离散质量之间的间距$L_{0}= 0.1$ m。
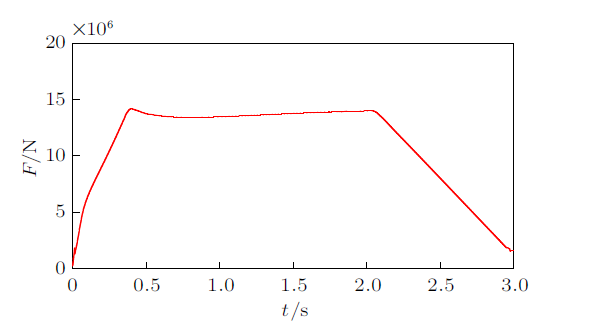
参考文献[3 ],假设控制系统的液压阻尼力如图5 所示。
图5
图5
液压阻尼力
Fig.5
Hydraulic damping force
3.2 仿真结果分析
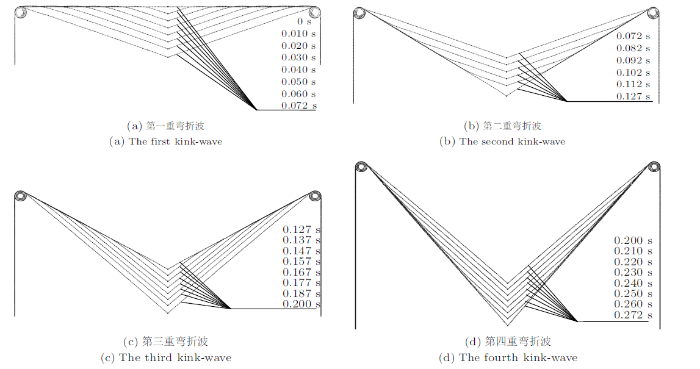
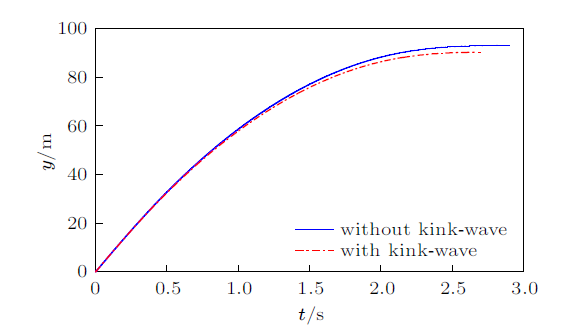
对拦阻索离散模型的舰载机拦阻过程进行数值仿真,得到不同时刻的拦阻索形状如图6 所示。考虑弯折波与不考虑弯折波情形下的舰载机位移、速度、加速度、拦阻索拉力和拉力角如图7 ~图11 所示。
图6
图6
拦阻索形状
Fig.6
Shape of arresting cable
图7
图7
舰载机位移
Fig.7
Displacement of carrier aircraft
图8
图8
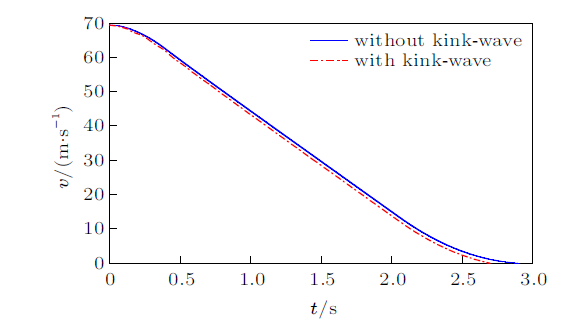
舰载机速度
Fig.8
Velocity of carrier aircraft
图9
图9
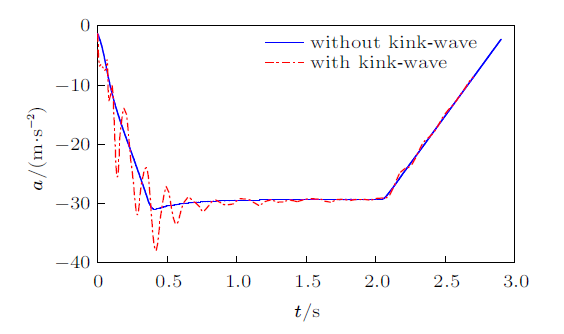
舰载机加速度
Fig.9
Acceleration of carrier aircraft
图10
图10
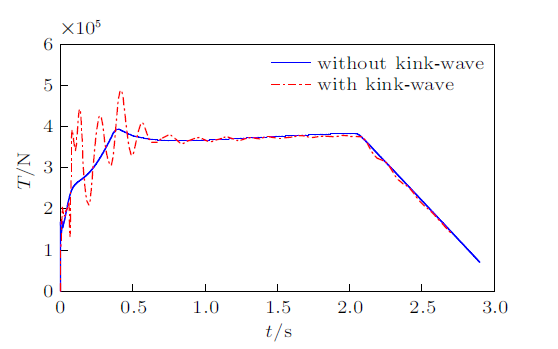
钩索结合点处拦阻索拉力
Fig.10
Tension at the junction of arresting hook and arresting cable
图11
图11
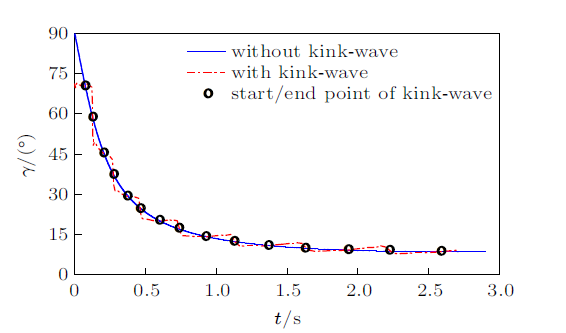
拦阻索拉力角
Fig.11
Angle of cable tension
从图6 (a)可以看出,在拦阻初始时刻,弯折波从钩索结合点处产生并沿拦阻索向甲板滑轮处传递,此过程的弯折波为第一重弯折波。从图6 (b)可以看出,第一重弯折波传递到甲板滑轮处立即消失,在甲板滑轮处产生新的弯折波向钩索结合点处传递,此传递过程中的弯折波为第二重弯折波。从图6 (c)可以看出,第二重弯折波传递到钩索结合点处结束,产生第三重弯折波向甲板滑轮处传递。图6 (d)为第四重弯折波由甲板滑轮处向钩索结合点处传递。整个拦阻过程中,弯折波在钩索结合点与甲板滑轮之间来回传递。根据拦阻索形状可以确定每重弯折波的起止时间。
从图7 和图8 可以看出,不考虑弯折波的拦阻过程,舰载机在2.9 s时,位移为93.1 m处被拦停;考虑弯折波的拦阻过程,舰载机在2.7 s时,位移为90.3 m处被拦停。相对于不考虑弯折波情况,考虑弯折波情况下的舰载机拦停时间缩短了6.9%,拦停位移减小了3.0%。两种情况下的舰载机位移和速度存在明显差异,这是由于弯折波的存在使得舰载机减速更快。从能量的角度看,与不考虑弯折波情况相比,考虑弯折波情况的拦阻过程,多了拦阻索消耗舰载机动能,从而使舰载机动能消耗更快,使舰载机在更短时间和更短位移内被拦停。
从图9 可以看出,不考虑弯折波情况下的舰载机加速度最大达到30.9 m/s$^{2}$;考虑弯折波情况下的舰载机加速度出现波动,且这种波动在拦阻初期最为剧烈,使舰载机加速度最大达到37.9 m/s$^{2}$,相对于不考虑弯折波情况下的载机加速度最大值增大了22.7%,之后波动逐渐减弱。两种情况下的舰载机加速度存在明显差异,考虑弯折波情况下的舰载机最大加速度大于不考虑弯折波情况下的舰载机最大加速度,这是因为弯折波对拦阻索拉力和拉力角的影响,使得舰载机加速度更大。
从图10 可以看出,不考虑弯折波情况下的钩索结合点处拦阻索拉力最大达到394.3 kN;考虑弯折波情况下的钩索结合点处拦阻索拉力出现波动,且这种波动在拦阻初期最为剧烈,使钩索结合点处拦阻索拉力最大达到489.4 kN,相对于不考虑弯折波情况下的钩索结合点处拦阻索拉力最大值增大了24.1%,之后波动逐渐减弱。
从图11 可以看出,不考虑弯折波情况下的拦阻索拉力角平滑下降,而考虑弯折波情况下的拦阻索拉力角随每重弯折波起止点产生规律性变化。考虑弯折波情况下的拦阻索拉力角在整个拦阻过程中处于减小趋势。在奇数重弯折波结束前后,拦阻索拉力角平稳变化。而在偶数重弯折波结束前后,拦阻索拉力角突然减小,且在拦阻初期,这种突减现象极为明显。
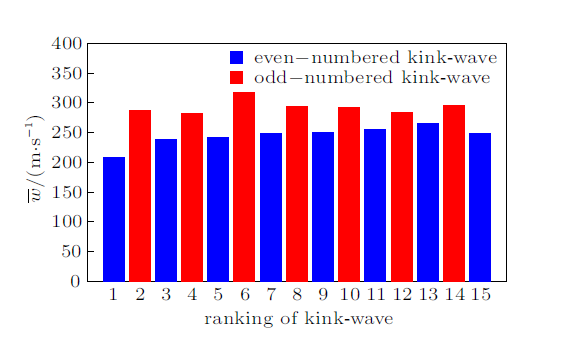
定义每重弯折波平均波速$\overline{{w}}$为每重弯折波起始时钩索结合点到甲板滑轮的距离与每重弯折波持续时间之比。通过计算得到每重弯折波平均波速,如图12 所示。在整个拦阻过程中,共有15重完整的弯折波。偶数重弯折波的平均波速明显大于奇数重弯折波的平均波速,这主要是因为舰载机拦阻使得拦阻索质点移动的方向始终由甲板滑轮处沿拦阻索向钩索结合点处。奇数重弯折波传递方向与拦阻索质点移动方向相反,导致弯折波波速减弱;偶数重弯折波传递方向与拦阻索质点移动方向相同,导致弯折波波速增强。
图12
图12
每重弯折波平均波速
Fig.12
Average velocity of kink-wave in each ranking
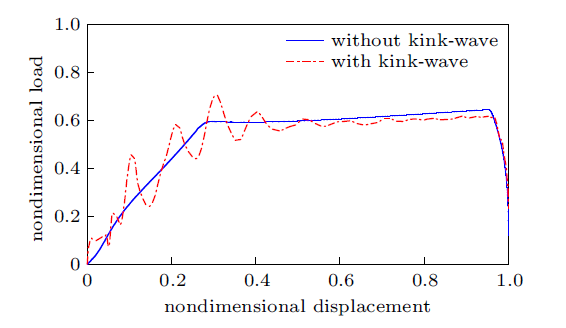
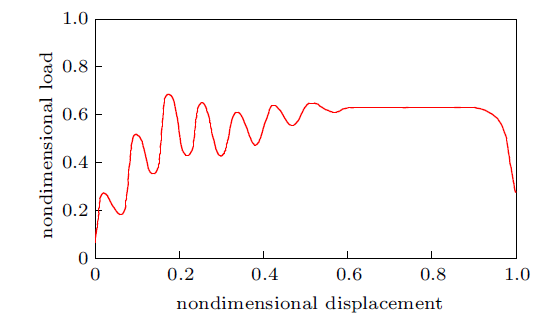
定义无量纲位移为 $ y/y_{\max}$,$y_{\max}$为最大拦阻位移;无量纲钩载为 $Hy_{\max}/(mv_{0}^{2})$,则本文仿真得到的无量纲钩载随无量纲位移的变化曲线如图13 所示。图14 给出了美国军用标准MIL-STD-2066通过实验得到的无量纲钩载随无量纲位移的变化规律。
图13
图13
无量纲钩载随无量纲位移的变化
Fig.13
Nondimensional load vs nondimensional displacement
图14
图14
MIL-STD-2066实验得到的钩载随行程变化规律[9 ]
Fig.14
Nondimensional load vs nondimensional displacement in MIL-STD-2066
比较图13 与图14 可以看出,弯折波的存在使得拦阻钩载荷出现波动,且这种波动在拦阻初期最为剧烈,之后逐渐减弱。本文的结果与美军标的实验结果比较吻合,本文方法很清晰地展示了弯折波的存在会使钩载在拦阻过程中产生波动现象。
弯折波的存在,使得拦阻索拉力角产生规律性变化,还使得钩索结合点处拦阻索拉力出现波动,这种波动使得拦阻索受到的最大拉力增大。拦阻索拉力和拉力角的变化引起舰载机加速度的变化,使舰载机减速更快,进而使得舰载机在更短时间和更短位移内被拦停。从舰载机加速度看,考虑弯折波情况下的舰载机加速度最大值更大,这将影响驾驶员的舒适性,甚至安全性;从拦阻索拉力看,考虑弯折波情况下的拦阻索拉力最大值更大,这将直接影响拦阻过程的安全性。因此在拦阻过程中考虑弯折波是有必要的。
4 结论
本文研究在舰载机拦阻过程中拦阻索上的弯折波现象,建立考虑弯折波的拦阻索离散模型,对拦阻过程进行数值仿真,主要得出结论如下。
(1) 弯折波在整个拦阻过程均存在,在甲板滑轮与钩索结合点之间来回传递。
(2) 弯折波的存在,使得拦阻索拉力角产生规律性变化,还使得钩索结合点处拦阻索拉力出现波动,从而使拦阻钩载荷和舰载机加速度出现波动,且这种波动在拦阻初期最为剧烈,之后逐渐减弱。弯折波的存在明显缩短了拦停时间和拦停位移,还使得拦阻索拉力最大值更大,从而使得拦阻过程对拦阻索强度要求更高。
(3) 奇数重弯折波与偶数重弯折波传播方向相反,偶数重弯折波平均波速大于奇数重弯折波平均波速。奇数重弯折波结束前后,拦阻索拉力角平稳变化。偶数重弯折波结束前后,拦阻索拉力角突然减小,且在拦阻初期,这种突减现象极为明显。
参考文献
View Option
[1]
罗青 , 冯蕴雯 , 冯元生 . 基于弯折波的舰载机拦阻着舰动力学分析与仿真研究
机械强度 , 2009 , 31 (4 ):543 -547
[本文引用: 3]
Luo Qing Feng Yunwen Feng Yuansheng . Dynamic analysis simulation of carrier aircraft arresting deck-landing based on kink-wave
Journal of Mechanical Strength 2009 , 31 (4 ):543 -547 (in Chinese)
[本文引用: 3]
[2]
李启明 , 冯蕴雯 , 于立明 . 飞机拦阻着陆动力学分析与仿真
计算机仿真 , 2010 , 27 (1 ):27 -31
[本文引用: 1]
Li Qiming Feng Yunwen Yu Liming . Kinetics analysis and simulation of aircraft arrested shore-landing
Computer Simulation 2010 , 27 (1 ):27 -31 (in Chinese)
[本文引用: 1]
[3]
张萍 , 金栋平 . 计及弯折波的舰载机拦阻过程控制
航空学报 , 2011 , 32 (11 ):2008 -2015
[本文引用: 3]
Zhang Ping Jin Dongping . Control of arresting process for carrier aircraft considering kink-wave
Acta Aeronautica et Astronautica Sinica 2011 , 32 (11 ):2008 -2015 (in Chinese)
[本文引用: 3]
[4]
谢朋朋 , 彭一明 , 魏小辉 等 . 计及弯折波的舰载飞机偏心拦阻动力学分析
北京航空航天大学学报 , 2020 , 46 (8 ):1582 -1591
[本文引用: 1]
Xie Pengpeng Peng Yiming Wei Xiaohui , et al . Dynamic analysis of off-center arrest for carrier-based aircraft considering kink wave
Journal of Beijing University of Aeronautics and Astronautics 2020 , 46 (8 ):1582 -1591 (in Chinese)
[本文引用: 1]
[5]
梁利华 , 万晨 , 荀盼盼 . 飞机拦阻索动态特性研究
航空学报 , 2013 , 34 (4 ):833 -839
[本文引用: 1]
Liang Lihua Wan Chen Xun Panpan . Study on dynamic performance of aircraft arresting cable
Acta Aeronautica et Astronautica Sinica 2013 , 34 (4 ):833 -839 (in Chinese)
[本文引用: 1]
[6]
彭一明 , 聂宏 , 张明 等 . 偏航状态下拦阻钩挂索动力学分析
航空学报 , 2015 , 36 (6 ):1876 -1884
[本文引用: 1]
Peng Yiming Nie Hong Zhang Ming , et al . Dynamics analysis of arresting hook following engagement of an arresting cable in yaw condition
Acta Aeronautica et Astronautica Sinica 2015 , 36 (6 ):1876 -1884 (in Chinese)
[本文引用: 1]
[7]
Xu B Dong PP Zhang JH , et al . A three dimensional approach to model steel wire ropes used in high energy absorber apparatus
International Journal of Solids and Structures 2014 , 51 (25-26 ):4280 -4293
DOI
URL
[本文引用: 1]
[8]
Oden JT Ripperger EA . Mechanics of Elastic Structures, 2nd ed
New York: McGraw-Hill Book Company , 1981
[本文引用: 1]
[9]
王礼立 . 柔性弦中弹塑性波的传播
力学学报 , 1964 , 7 (3 ):228 -240
DOI
[本文引用: 2]
本文用Lagrange方法研究了弦中弹塑性枞波和横波的传播,对不论是强间断或弱间断建立了一般微分关系式.着重讨论了相似问题.对于无滑动冲击的情况,问题是容易求解的;对于滑动冲击的情况,在补充考察了摩擦条件后,问题也可以求解.此外,论证了能量守恒条件;讨论了理想塑性弦的特殊情况.文中指出了文献[1]和[2]的某些错误.
[10]
Naval Air Engineering Center . Military standard catapulting and arresting gear forcing functions for aircraft design: MIL-STD-2066(AS). United State,
Department of the Navy Air Systems Command , 1981
[本文引用: 1]
基于弯折波的舰载机拦阻着舰动力学分析与仿真研究
3
2009
... 在拦阻过程中,拦阻索是舰载机是否安全拦停的关键,因此对于拦阻索的力学特性研究是不可或缺的环节.近年来,大量研究考虑拦阻索质量和惯性,研究拦阻过程中的弯折波现象.罗青等[1 ] 建立了考虑前三重弯折波的拦阻数学模型,研究舰载机在不同着陆重量与不同啮合速度组合下着舰时的钩载随时间以及冲程的变化规律;李启明等[2 ] 建立了拦阻过程动力学模型,对应力波在拦阻索/尼龙带中的传播及作用进行了研究;张萍等[3 ] 研究了考虑弯折波的舰载机拦阻过程的控制问题,验证了拦阻索中应力的传播对拦阻过程的影响;谢朋朋等[4 ] 建立了考虑前三重弯折波的偏心拦阻模型,研究偏心度对舰载机拦阻过程的安全特性的影响;梁利华等[5 ] 将拦阻索离散为具有弹性和阻尼特性的单自由度梁单元,建立了拦阻系统的碰撞动力学模型,研究拦阻索中的应力波;彭一明等[6 ] 建立了偏航着舰时拦阻钩上转和横摆动力学模型,研究和分析了偏航拦阻前期的弯折波现象及其对拦阻过程的影响;Xu等[7 ] 建立了三维拦阻的数学模型,考虑了空间中的弯折波,并对模型进行了数值仿真.上述研究大多对弯折波进行了简化处理,认为弯折波是从钩索结合点向甲板滑轮单向传递的,且只考虑了前三重弯折波的影响. ...
... 由于波的传递导致弹性索上应力不等,弹性索质点产生了移动,其移动速度[1 ] 为 ...
... 在弹性索上,纵波、横波与弹性索质点移动的共同作用决定了弯折波波速[1 ] 为 ...
基于弯折波的舰载机拦阻着舰动力学分析与仿真研究
3
2009
... 在拦阻过程中,拦阻索是舰载机是否安全拦停的关键,因此对于拦阻索的力学特性研究是不可或缺的环节.近年来,大量研究考虑拦阻索质量和惯性,研究拦阻过程中的弯折波现象.罗青等[1 ] 建立了考虑前三重弯折波的拦阻数学模型,研究舰载机在不同着陆重量与不同啮合速度组合下着舰时的钩载随时间以及冲程的变化规律;李启明等[2 ] 建立了拦阻过程动力学模型,对应力波在拦阻索/尼龙带中的传播及作用进行了研究;张萍等[3 ] 研究了考虑弯折波的舰载机拦阻过程的控制问题,验证了拦阻索中应力的传播对拦阻过程的影响;谢朋朋等[4 ] 建立了考虑前三重弯折波的偏心拦阻模型,研究偏心度对舰载机拦阻过程的安全特性的影响;梁利华等[5 ] 将拦阻索离散为具有弹性和阻尼特性的单自由度梁单元,建立了拦阻系统的碰撞动力学模型,研究拦阻索中的应力波;彭一明等[6 ] 建立了偏航着舰时拦阻钩上转和横摆动力学模型,研究和分析了偏航拦阻前期的弯折波现象及其对拦阻过程的影响;Xu等[7 ] 建立了三维拦阻的数学模型,考虑了空间中的弯折波,并对模型进行了数值仿真.上述研究大多对弯折波进行了简化处理,认为弯折波是从钩索结合点向甲板滑轮单向传递的,且只考虑了前三重弯折波的影响. ...
... 由于波的传递导致弹性索上应力不等,弹性索质点产生了移动,其移动速度[1 ] 为 ...
... 在弹性索上,纵波、横波与弹性索质点移动的共同作用决定了弯折波波速[1 ] 为 ...
飞机拦阻着陆动力学分析与仿真
1
2010
... 在拦阻过程中,拦阻索是舰载机是否安全拦停的关键,因此对于拦阻索的力学特性研究是不可或缺的环节.近年来,大量研究考虑拦阻索质量和惯性,研究拦阻过程中的弯折波现象.罗青等[1 ] 建立了考虑前三重弯折波的拦阻数学模型,研究舰载机在不同着陆重量与不同啮合速度组合下着舰时的钩载随时间以及冲程的变化规律;李启明等[2 ] 建立了拦阻过程动力学模型,对应力波在拦阻索/尼龙带中的传播及作用进行了研究;张萍等[3 ] 研究了考虑弯折波的舰载机拦阻过程的控制问题,验证了拦阻索中应力的传播对拦阻过程的影响;谢朋朋等[4 ] 建立了考虑前三重弯折波的偏心拦阻模型,研究偏心度对舰载机拦阻过程的安全特性的影响;梁利华等[5 ] 将拦阻索离散为具有弹性和阻尼特性的单自由度梁单元,建立了拦阻系统的碰撞动力学模型,研究拦阻索中的应力波;彭一明等[6 ] 建立了偏航着舰时拦阻钩上转和横摆动力学模型,研究和分析了偏航拦阻前期的弯折波现象及其对拦阻过程的影响;Xu等[7 ] 建立了三维拦阻的数学模型,考虑了空间中的弯折波,并对模型进行了数值仿真.上述研究大多对弯折波进行了简化处理,认为弯折波是从钩索结合点向甲板滑轮单向传递的,且只考虑了前三重弯折波的影响. ...
飞机拦阻着陆动力学分析与仿真
1
2010
... 在拦阻过程中,拦阻索是舰载机是否安全拦停的关键,因此对于拦阻索的力学特性研究是不可或缺的环节.近年来,大量研究考虑拦阻索质量和惯性,研究拦阻过程中的弯折波现象.罗青等[1 ] 建立了考虑前三重弯折波的拦阻数学模型,研究舰载机在不同着陆重量与不同啮合速度组合下着舰时的钩载随时间以及冲程的变化规律;李启明等[2 ] 建立了拦阻过程动力学模型,对应力波在拦阻索/尼龙带中的传播及作用进行了研究;张萍等[3 ] 研究了考虑弯折波的舰载机拦阻过程的控制问题,验证了拦阻索中应力的传播对拦阻过程的影响;谢朋朋等[4 ] 建立了考虑前三重弯折波的偏心拦阻模型,研究偏心度对舰载机拦阻过程的安全特性的影响;梁利华等[5 ] 将拦阻索离散为具有弹性和阻尼特性的单自由度梁单元,建立了拦阻系统的碰撞动力学模型,研究拦阻索中的应力波;彭一明等[6 ] 建立了偏航着舰时拦阻钩上转和横摆动力学模型,研究和分析了偏航拦阻前期的弯折波现象及其对拦阻过程的影响;Xu等[7 ] 建立了三维拦阻的数学模型,考虑了空间中的弯折波,并对模型进行了数值仿真.上述研究大多对弯折波进行了简化处理,认为弯折波是从钩索结合点向甲板滑轮单向传递的,且只考虑了前三重弯折波的影响. ...
计及弯折波的舰载机拦阻过程控制
3
2011
... 在拦阻过程中,拦阻索是舰载机是否安全拦停的关键,因此对于拦阻索的力学特性研究是不可或缺的环节.近年来,大量研究考虑拦阻索质量和惯性,研究拦阻过程中的弯折波现象.罗青等[1 ] 建立了考虑前三重弯折波的拦阻数学模型,研究舰载机在不同着陆重量与不同啮合速度组合下着舰时的钩载随时间以及冲程的变化规律;李启明等[2 ] 建立了拦阻过程动力学模型,对应力波在拦阻索/尼龙带中的传播及作用进行了研究;张萍等[3 ] 研究了考虑弯折波的舰载机拦阻过程的控制问题,验证了拦阻索中应力的传播对拦阻过程的影响;谢朋朋等[4 ] 建立了考虑前三重弯折波的偏心拦阻模型,研究偏心度对舰载机拦阻过程的安全特性的影响;梁利华等[5 ] 将拦阻索离散为具有弹性和阻尼特性的单自由度梁单元,建立了拦阻系统的碰撞动力学模型,研究拦阻索中的应力波;彭一明等[6 ] 建立了偏航着舰时拦阻钩上转和横摆动力学模型,研究和分析了偏航拦阻前期的弯折波现象及其对拦阻过程的影响;Xu等[7 ] 建立了三维拦阻的数学模型,考虑了空间中的弯折波,并对模型进行了数值仿真.上述研究大多对弯折波进行了简化处理,认为弯折波是从钩索结合点向甲板滑轮单向传递的,且只考虑了前三重弯折波的影响. ...
... 当弹性索的初始应力为零时,简化后的弯折波波速[3 ] 为 ...
... 参考文献[3 ],假设控制系统的液压阻尼力如图5 所示. ...
计及弯折波的舰载机拦阻过程控制
3
2011
... 在拦阻过程中,拦阻索是舰载机是否安全拦停的关键,因此对于拦阻索的力学特性研究是不可或缺的环节.近年来,大量研究考虑拦阻索质量和惯性,研究拦阻过程中的弯折波现象.罗青等[1 ] 建立了考虑前三重弯折波的拦阻数学模型,研究舰载机在不同着陆重量与不同啮合速度组合下着舰时的钩载随时间以及冲程的变化规律;李启明等[2 ] 建立了拦阻过程动力学模型,对应力波在拦阻索/尼龙带中的传播及作用进行了研究;张萍等[3 ] 研究了考虑弯折波的舰载机拦阻过程的控制问题,验证了拦阻索中应力的传播对拦阻过程的影响;谢朋朋等[4 ] 建立了考虑前三重弯折波的偏心拦阻模型,研究偏心度对舰载机拦阻过程的安全特性的影响;梁利华等[5 ] 将拦阻索离散为具有弹性和阻尼特性的单自由度梁单元,建立了拦阻系统的碰撞动力学模型,研究拦阻索中的应力波;彭一明等[6 ] 建立了偏航着舰时拦阻钩上转和横摆动力学模型,研究和分析了偏航拦阻前期的弯折波现象及其对拦阻过程的影响;Xu等[7 ] 建立了三维拦阻的数学模型,考虑了空间中的弯折波,并对模型进行了数值仿真.上述研究大多对弯折波进行了简化处理,认为弯折波是从钩索结合点向甲板滑轮单向传递的,且只考虑了前三重弯折波的影响. ...
... 当弹性索的初始应力为零时,简化后的弯折波波速[3 ] 为 ...
... 参考文献[3 ],假设控制系统的液压阻尼力如图5 所示. ...
计及弯折波的舰载飞机偏心拦阻动力学分析
1
2020
... 在拦阻过程中,拦阻索是舰载机是否安全拦停的关键,因此对于拦阻索的力学特性研究是不可或缺的环节.近年来,大量研究考虑拦阻索质量和惯性,研究拦阻过程中的弯折波现象.罗青等[1 ] 建立了考虑前三重弯折波的拦阻数学模型,研究舰载机在不同着陆重量与不同啮合速度组合下着舰时的钩载随时间以及冲程的变化规律;李启明等[2 ] 建立了拦阻过程动力学模型,对应力波在拦阻索/尼龙带中的传播及作用进行了研究;张萍等[3 ] 研究了考虑弯折波的舰载机拦阻过程的控制问题,验证了拦阻索中应力的传播对拦阻过程的影响;谢朋朋等[4 ] 建立了考虑前三重弯折波的偏心拦阻模型,研究偏心度对舰载机拦阻过程的安全特性的影响;梁利华等[5 ] 将拦阻索离散为具有弹性和阻尼特性的单自由度梁单元,建立了拦阻系统的碰撞动力学模型,研究拦阻索中的应力波;彭一明等[6 ] 建立了偏航着舰时拦阻钩上转和横摆动力学模型,研究和分析了偏航拦阻前期的弯折波现象及其对拦阻过程的影响;Xu等[7 ] 建立了三维拦阻的数学模型,考虑了空间中的弯折波,并对模型进行了数值仿真.上述研究大多对弯折波进行了简化处理,认为弯折波是从钩索结合点向甲板滑轮单向传递的,且只考虑了前三重弯折波的影响. ...
计及弯折波的舰载飞机偏心拦阻动力学分析
1
2020
... 在拦阻过程中,拦阻索是舰载机是否安全拦停的关键,因此对于拦阻索的力学特性研究是不可或缺的环节.近年来,大量研究考虑拦阻索质量和惯性,研究拦阻过程中的弯折波现象.罗青等[1 ] 建立了考虑前三重弯折波的拦阻数学模型,研究舰载机在不同着陆重量与不同啮合速度组合下着舰时的钩载随时间以及冲程的变化规律;李启明等[2 ] 建立了拦阻过程动力学模型,对应力波在拦阻索/尼龙带中的传播及作用进行了研究;张萍等[3 ] 研究了考虑弯折波的舰载机拦阻过程的控制问题,验证了拦阻索中应力的传播对拦阻过程的影响;谢朋朋等[4 ] 建立了考虑前三重弯折波的偏心拦阻模型,研究偏心度对舰载机拦阻过程的安全特性的影响;梁利华等[5 ] 将拦阻索离散为具有弹性和阻尼特性的单自由度梁单元,建立了拦阻系统的碰撞动力学模型,研究拦阻索中的应力波;彭一明等[6 ] 建立了偏航着舰时拦阻钩上转和横摆动力学模型,研究和分析了偏航拦阻前期的弯折波现象及其对拦阻过程的影响;Xu等[7 ] 建立了三维拦阻的数学模型,考虑了空间中的弯折波,并对模型进行了数值仿真.上述研究大多对弯折波进行了简化处理,认为弯折波是从钩索结合点向甲板滑轮单向传递的,且只考虑了前三重弯折波的影响. ...
飞机拦阻索动态特性研究
1
2013
... 在拦阻过程中,拦阻索是舰载机是否安全拦停的关键,因此对于拦阻索的力学特性研究是不可或缺的环节.近年来,大量研究考虑拦阻索质量和惯性,研究拦阻过程中的弯折波现象.罗青等[1 ] 建立了考虑前三重弯折波的拦阻数学模型,研究舰载机在不同着陆重量与不同啮合速度组合下着舰时的钩载随时间以及冲程的变化规律;李启明等[2 ] 建立了拦阻过程动力学模型,对应力波在拦阻索/尼龙带中的传播及作用进行了研究;张萍等[3 ] 研究了考虑弯折波的舰载机拦阻过程的控制问题,验证了拦阻索中应力的传播对拦阻过程的影响;谢朋朋等[4 ] 建立了考虑前三重弯折波的偏心拦阻模型,研究偏心度对舰载机拦阻过程的安全特性的影响;梁利华等[5 ] 将拦阻索离散为具有弹性和阻尼特性的单自由度梁单元,建立了拦阻系统的碰撞动力学模型,研究拦阻索中的应力波;彭一明等[6 ] 建立了偏航着舰时拦阻钩上转和横摆动力学模型,研究和分析了偏航拦阻前期的弯折波现象及其对拦阻过程的影响;Xu等[7 ] 建立了三维拦阻的数学模型,考虑了空间中的弯折波,并对模型进行了数值仿真.上述研究大多对弯折波进行了简化处理,认为弯折波是从钩索结合点向甲板滑轮单向传递的,且只考虑了前三重弯折波的影响. ...
飞机拦阻索动态特性研究
1
2013
... 在拦阻过程中,拦阻索是舰载机是否安全拦停的关键,因此对于拦阻索的力学特性研究是不可或缺的环节.近年来,大量研究考虑拦阻索质量和惯性,研究拦阻过程中的弯折波现象.罗青等[1 ] 建立了考虑前三重弯折波的拦阻数学模型,研究舰载机在不同着陆重量与不同啮合速度组合下着舰时的钩载随时间以及冲程的变化规律;李启明等[2 ] 建立了拦阻过程动力学模型,对应力波在拦阻索/尼龙带中的传播及作用进行了研究;张萍等[3 ] 研究了考虑弯折波的舰载机拦阻过程的控制问题,验证了拦阻索中应力的传播对拦阻过程的影响;谢朋朋等[4 ] 建立了考虑前三重弯折波的偏心拦阻模型,研究偏心度对舰载机拦阻过程的安全特性的影响;梁利华等[5 ] 将拦阻索离散为具有弹性和阻尼特性的单自由度梁单元,建立了拦阻系统的碰撞动力学模型,研究拦阻索中的应力波;彭一明等[6 ] 建立了偏航着舰时拦阻钩上转和横摆动力学模型,研究和分析了偏航拦阻前期的弯折波现象及其对拦阻过程的影响;Xu等[7 ] 建立了三维拦阻的数学模型,考虑了空间中的弯折波,并对模型进行了数值仿真.上述研究大多对弯折波进行了简化处理,认为弯折波是从钩索结合点向甲板滑轮单向传递的,且只考虑了前三重弯折波的影响. ...
偏航状态下拦阻钩挂索动力学分析
1
2015
... 在拦阻过程中,拦阻索是舰载机是否安全拦停的关键,因此对于拦阻索的力学特性研究是不可或缺的环节.近年来,大量研究考虑拦阻索质量和惯性,研究拦阻过程中的弯折波现象.罗青等[1 ] 建立了考虑前三重弯折波的拦阻数学模型,研究舰载机在不同着陆重量与不同啮合速度组合下着舰时的钩载随时间以及冲程的变化规律;李启明等[2 ] 建立了拦阻过程动力学模型,对应力波在拦阻索/尼龙带中的传播及作用进行了研究;张萍等[3 ] 研究了考虑弯折波的舰载机拦阻过程的控制问题,验证了拦阻索中应力的传播对拦阻过程的影响;谢朋朋等[4 ] 建立了考虑前三重弯折波的偏心拦阻模型,研究偏心度对舰载机拦阻过程的安全特性的影响;梁利华等[5 ] 将拦阻索离散为具有弹性和阻尼特性的单自由度梁单元,建立了拦阻系统的碰撞动力学模型,研究拦阻索中的应力波;彭一明等[6 ] 建立了偏航着舰时拦阻钩上转和横摆动力学模型,研究和分析了偏航拦阻前期的弯折波现象及其对拦阻过程的影响;Xu等[7 ] 建立了三维拦阻的数学模型,考虑了空间中的弯折波,并对模型进行了数值仿真.上述研究大多对弯折波进行了简化处理,认为弯折波是从钩索结合点向甲板滑轮单向传递的,且只考虑了前三重弯折波的影响. ...
偏航状态下拦阻钩挂索动力学分析
1
2015
... 在拦阻过程中,拦阻索是舰载机是否安全拦停的关键,因此对于拦阻索的力学特性研究是不可或缺的环节.近年来,大量研究考虑拦阻索质量和惯性,研究拦阻过程中的弯折波现象.罗青等[1 ] 建立了考虑前三重弯折波的拦阻数学模型,研究舰载机在不同着陆重量与不同啮合速度组合下着舰时的钩载随时间以及冲程的变化规律;李启明等[2 ] 建立了拦阻过程动力学模型,对应力波在拦阻索/尼龙带中的传播及作用进行了研究;张萍等[3 ] 研究了考虑弯折波的舰载机拦阻过程的控制问题,验证了拦阻索中应力的传播对拦阻过程的影响;谢朋朋等[4 ] 建立了考虑前三重弯折波的偏心拦阻模型,研究偏心度对舰载机拦阻过程的安全特性的影响;梁利华等[5 ] 将拦阻索离散为具有弹性和阻尼特性的单自由度梁单元,建立了拦阻系统的碰撞动力学模型,研究拦阻索中的应力波;彭一明等[6 ] 建立了偏航着舰时拦阻钩上转和横摆动力学模型,研究和分析了偏航拦阻前期的弯折波现象及其对拦阻过程的影响;Xu等[7 ] 建立了三维拦阻的数学模型,考虑了空间中的弯折波,并对模型进行了数值仿真.上述研究大多对弯折波进行了简化处理,认为弯折波是从钩索结合点向甲板滑轮单向传递的,且只考虑了前三重弯折波的影响. ...
A three dimensional approach to model steel wire ropes used in high energy absorber apparatus
1
2014
... 在拦阻过程中,拦阻索是舰载机是否安全拦停的关键,因此对于拦阻索的力学特性研究是不可或缺的环节.近年来,大量研究考虑拦阻索质量和惯性,研究拦阻过程中的弯折波现象.罗青等[1 ] 建立了考虑前三重弯折波的拦阻数学模型,研究舰载机在不同着陆重量与不同啮合速度组合下着舰时的钩载随时间以及冲程的变化规律;李启明等[2 ] 建立了拦阻过程动力学模型,对应力波在拦阻索/尼龙带中的传播及作用进行了研究;张萍等[3 ] 研究了考虑弯折波的舰载机拦阻过程的控制问题,验证了拦阻索中应力的传播对拦阻过程的影响;谢朋朋等[4 ] 建立了考虑前三重弯折波的偏心拦阻模型,研究偏心度对舰载机拦阻过程的安全特性的影响;梁利华等[5 ] 将拦阻索离散为具有弹性和阻尼特性的单自由度梁单元,建立了拦阻系统的碰撞动力学模型,研究拦阻索中的应力波;彭一明等[6 ] 建立了偏航着舰时拦阻钩上转和横摆动力学模型,研究和分析了偏航拦阻前期的弯折波现象及其对拦阻过程的影响;Xu等[7 ] 建立了三维拦阻的数学模型,考虑了空间中的弯折波,并对模型进行了数值仿真.上述研究大多对弯折波进行了简化处理,认为弯折波是从钩索结合点向甲板滑轮单向传递的,且只考虑了前三重弯折波的影响. ...
Mechanics of Elastic Structures, 2nd ed
1
1981
... 式中,$I_{xx}$,$I_{yy}$,$I_{zz}$分别为拦阻索截面极惯性矩、拦阻索截面对中性轴$y$及$z$的惯性矩;$P_{y}$和$P_{z}$分别为$y$方向和$z$方向对刚度的影响因子.$E$和$G$分别表示拦阻索的弹性模量和剪切弹性模量;$R_{kb} $和$R_{kt}$分别为弯曲刚度乘子和扭转刚度乘子;$ASY$和$ASZ$分别为$y$方向和$z$方向上的剪切修正因子,与拦阻索截面形状有关,根据文献[8 ] ,实心圆截面取$ASY =ASZ=10/9$. ...
柔性弦中弹塑性波的传播
2
1964
... 文献[9 ] 用拉格朗日方法研究了横波的传递,给出了一维应力状态下横波波速$\overline{c}$的表达式为 ...
... 定义无量纲位移为 $ y/y_{\max}$,$y_{\max}$为最大拦阻位移;无量纲钩载为 $Hy_{\max}/(mv_{0}^{2})$,则本文仿真得到的无量纲钩载随无量纲位移的变化曲线如
图13 所示.
图14 给出了美国军用标准MIL-STD-2066通过实验得到的无量纲钩载随无量纲位移的变化规律.
图13 无量纲钩载随无量纲位移的变化 Nondimensional load vs nondimensional displacement Fig.13 ![]()
图14 MIL-STD-2066实验得到的钩载随行程变化规律<sup>[<xref ref-type="bibr" rid="b9">9</xref>]</sup> Nondimensional load vs nondimensional displacement in MIL-STD-2066 Fig.14 ![]()
比较图13 与图14 可以看出,弯折波的存在使得拦阻钩载荷出现波动,且这种波动在拦阻初期最为剧烈,之后逐渐减弱.本文的结果与美军标的实验结果比较吻合,本文方法很清晰地展示了弯折波的存在会使钩载在拦阻过程中产生波动现象. ...
Military standard catapulting and arresting gear forcing functions for aircraft design: MIL-STD-2066(AS). United State,
1
1981
... 本文假设舰载机的拦阻参数为:舰载机质量$m = 22 680$ kg,初始拦阻速度$v_{0} =69.4$ m/s;拦阻索密度$\rho = 9332$ kg/m$^{3}$,横截面积$q = 480$ mm$^{2}$,弹性模量$E = 88$ GPa,剪切弹性模量$G = 35.2$ GPa;单侧拦阻索总长$D =110$ m,两甲板滑轮间距半长$d = 15$ m,动滑轮组总质量$M = 6519$ kg,单侧动滑轮个数$n = 9$.参考文献[10 ],假设发动机推力$F_{T} =0.4mg$,摩擦因数$k_{1} = 0.017$,气动阻力因数$k_{2} = (0.526+0.000 105mg)$ N $\cdot$ $s^{2}/m^{2}$.根据2.1节内容将拦阻索离散为若干质量,离散质量之间的间距$L_{0}= 0.1$ m. ...




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}