地基在移动荷载作用下的动力响应一直是岩土工程和交通工程领域的重点关注课题。随着运输业的发展,车辆的行驶速度越来越快,载重也越来越大,在此背景下研究地基土在移动荷载作用下动力响应问题对于道路结构设计和环境振动影响分析都具有重要意义。地基土体是一种具有多相组成和骨架孔隙结构的复杂介质,在动力作用下由于土体内部存在多场耦合效应,使其动力响应分析变得非常复杂。将地基土体视为固体骨架和孔隙水组成的两相饱和介质,利用Biot多孔介质波动理论进行动力响应分析已经相当成熟[1 -4 ] 。徐斌等[5 ] 根据Biot波动理论,采用传递、反射矩阵方法研究了移动荷载作用下层状饱和土动力响应问题。王立安等[6 ] 对非均匀饱和地基的动力特性做了研究。徐长节等[7 ] 和周凤玺等[8 ] 基于Vardoulakis等[9 ] 的理论研究了非饱和土中波的传播规律。李绍毅[10 ] 采用半解析法研究了移动荷载作用下多层非饱和铁路地基的共振问题,分析了土体饱和度对非饱和地基振动的影响。Lu等[11 ] 研究了矩形移动荷载作用下非饱和地基的动力响应。Fang等[12 ] 研究了列车荷载作用下非饱和地基的振动响应。Song等[13 ] 对埋置荷载作用下的非饱和地基动力响应问题做了研究。
上述关于非饱和地基的动力响应研究中,学者们都将地基考虑为单层非饱和介质,而实际自然界中的地基由于地下水的存在,地基底部土体往往是完全饱和的,只有顶部一定深度范围内受到环境气候的影响表现为非饱和状态。因此,对地基进行更精确的理论分析时,应将地基考虑为由下层饱和土和上层非饱和土层叠而成的半空间。
基于以上分析,文中将地基考虑为饱和土和非饱和土层叠而成的半空间模型,利用三重Fourier变换和降阶法对饱和土和非饱和土的控制方程进行耦合求解,推导出地基在矩形移动荷载作用下的动力响应解。通过算例分析,对模型验证计算并给出了地表位移峰值沿上层非饱和土体饱和度和土层厚度的变化规律曲线,同时也给出了矩形移动荷载作用下地表($z=0$)竖向位移的空间分布及竖向振动峰值与速度的关系曲线。
1 问题模型
如图1 所示,由非饱和土和饱和土层叠而成的半空间表面作用一矩形移动荷载$Q$,荷载移动速度为$c$,荷载分布长、宽分别为2$a$和2$b$。上层非饱和土厚度为$H$,下层饱和土为无限厚度。 图中,$\lambda^{\ast }$, $\mu^{\ast}$为饱和土对应的Lamb常数,其表达式分别为
$\lambda^{\ast }=\dfrac{E^{\ast}\nu^{\ast }}{\left( {1+\nu^{\ast }} \right)\left( {1-2\nu^{\ast }}\right)},\ \mu^{\ast }=\dfrac{E^{\ast }}{2\left( {1+\nu^{\ast }}\right)}$
图1
图1
计算模型
Fig. 1
Computational model
式中$E^{\ast }$和$\nu^{\ast }$分别为弹性模量和泊松比。$n^{\ast }$, $k_{\rm d}^{\ast }$, $\rho^{\ast }$, $\rho_{\rm s}^{\ast }$, $\rho_{\rm w}^{\ast}$分别为饱和土的孔隙率、渗透系数、饱和土的总质量密度、固相密度和水相密度;$\lambda$和$\mu $为对应于非饱和土的Lamd常数;$n$和$S_{\rm r}$分别为孔隙率和饱和度;$k_{\rm w}$,$k_{\rm a}$分别为非饱和土中孔隙水和气体的渗透系数。对于非饱和土的总质量密度$\rho$有
(1) $\rho =\left( {1-n} \right)\rho_{\rm s} +nS_{\rm r} \rho_{\rm w} +n\left( {1-S_{\rm r} }\right)\rho_{\rm a}$
式中,$\rho_{\rm s}$,$\rho_{\rm w}$和$\rho _{\rm a}$分别为非饱和土中固体、水和气体的质量密度。
2 非饱和土控制方程及求解
2.1 运动方程
根据混合物理论,考虑固-液-气之间的惯性耦合及毛细管压力,非饱和土的运动方程写为[12 -13 ]
(2) $\mu \nabla^{2}{u}+\left( {\lambda +\mu } \right)\nabla \varTheta -\alpha \chi \nabla p_{\rm w} -\alpha \left( {1-\chi } \right)\nabla p_{\rm a} = \\ \rho {\ddot{{u}}}+\rho_{\rm w} {\ddot{{w}}}+\rho_{\rm a}{\ddot{{v}}}$
(3) $-p_{w,i} =\rho_{\rm w} \ddot{{u}}_{i} +\dfrac{\rho_{\rm w} }{nS_{\rm r} }\ddot{{w}}_{i}+\dfrac{\rho_{\rm w} g}{k_{\rm w} }\dot{{w}}_{i}$
(4) $-p_{a,i} =\rho_{\rm a} \ddot{{u}}_{i} +\dfrac{\rho_{\rm a} }{n\left( {1-S_{\rm r} }\right)}\ddot{{v}}_{i} +\dfrac{\rho_{\rm a} g}{k_{\rm a} }\dot{{v}}_{i}$
式中,$u$为非饱和土体中固体骨架的位移矢量($u_{i}$,$i=x$, $y$, $z$);$w$,$v$分别为孔隙中水相和气相相对于固体骨架的相对位移矢量;$\theta$为固体骨架的体应变。“($^{{\cdot }})$”、“($^{{\cdot \cdot}})$”表示对时间$t$的一、二阶导数。$p_{\rm w}$,$p_{\rm a}$分别为孔隙水压力和孔隙气压力;$\alpha $为Biot系数,$\alpha=1-K_{\rm sf}/K_{\rm s}$,其中$K_{\rm sf}$和$K_{\rm s}$是土骨架和土颗粒的体积模量,$\lambda + 2\mu /3= K_{\rm sf}$;$\chi $为有效应力参数,取值与有效饱和度$S_{\rm e}$相同,$S_{\rm e}$的表达式为:$S_{\rm e}=(S_{\rm r}-S_{\rm w0})/(1-S_{\rm w0})$,其中$S_{\rm w0}$为束缚水饱和度(或残余饱和度);$g$为重力加速度。$\nabla$和$\nabla^{2}$分别为Hamilton算子和Laplace算子,即:$\nabla={\partial /x}+{\partial /y}+{\partial /z}$,$\nabla^{2}={{\partial^{2}}/{x^{2}}}+{{\partial^{2}}/{y^{2}}}+{{\partial^{2}}/{z^{2}}}$。对于非饱和土的总孔隙压力$p$,有
(5) $p=\chi p_{\rm w} +\left( {1-\chi } \right)p_{\rm a}$
2.2 本构方程
(6) $\sigma_{ij} =2\mu \varepsilon_{ij} +\delta_{ij} \lambda \theta -\delta_{ij} \alpha p$
式中,$\sigma_{ij}$ ($i,j=x,y,z$)为总应力,$\varepsilon_{ij}$是应变张量,$\delta_{ij}$为Kronecker符号。
2.3 质量守恒方程
(7) $A_{11} \dot{{p}}_{\rm w} +A_{12} \dot{{p}}_{\rm a} +A_{13} \nabla \cdot\dot{{u}}_{i} +A_{14} \nabla \cdot \dot{{v}}_{i} =0$
(8) $A_{21} \dot{{p}}_{\rm w} +A_{22} \dot{{p}}_{\rm a} +A_{23}\nabla \cdot \dot{{u}}_{i} +A_{24} \nabla \cdot \dot{{w}}_{i} =0$
式中,$A_{11}$$\sim$$A_{14}$, $A_{21}$$\sim$$A_{24}$见参考文献[13 ]。
2.4 非饱和土控制方程求解
对于Hamilton算子$\nabla $,有如下散度计算式
(9) $\theta =\nabla \cdot {u},\ \theta_{\rm w} =\nabla \cdot {w},\ \theta_{\rm a} =\nabla \cdot {v}$
式中,$\theta_{\rm w}$和$\theta_{\rm a}$分别为孔隙水和气体的体应变。
对空间坐标$x$,$y$和时间坐标$t$引入三重Fourier变换,其变换关系为
(10) $\left. \!\!{\begin{array}{l} \tilde{{\tilde{{\tilde{{f}}}}}}\left( {\xi,\eta,z,s}\right)\!=\!\displaystyle\int_{-\infty }^{+\infty } {\displaystyle\int_{-\infty }^{+\infty }{\displaystyle\int_{-\infty }^{+\infty } {f\left( {x,y,z,t} \right)} } } \\ {\rm e}^{-{i}\left( {\xi x+\eta y+st} \right)}{\rm d}x{\rm d}y{\rm d}t \\ f\left( {x,y,z,t} \right)\!=\!\dfrac{1}{8\pi^{3}}\displaystyle\int_{-\infty }^{+\infty } {\displaystyle\int_{-\infty }^{+\infty } {\displaystyle\int_{-\infty }^{+\infty } {\tilde{{\tilde{{\tilde{{f}}}}}}\left( {\xi,\eta,z,s} \right)} } } \\ {\rm e}^{{i}\left( {\xi x+\eta y+st} \right)}{\rm d}\xi {\rm d}\eta {\rm d}s \\ \end{array}}\!\! \right\}\quad$
式中,$\xi $,$\eta$,$s$分别为对应于$x$,$y$,$t$的变换参数;$\tilde{{\tilde{{\tilde{{f}}}}}}$表示对应场量的三重Fourier变换。
利用式(10)对式(2)$\sim$式(9)进行三重Fourier变换和算子运算,并通过降阶法求解常微分方程组得到非饱和土的位移、孔压及应力通解,详细解法参见文献[11 -12 ,14 -15 ]。
(11) $\begin{align} \left[ {\tilde{{\tilde{{\tilde{{u}}}}}}_{x} \tilde{{\tilde{{\tilde{{u}}}}}}_{y}\ \tilde{{\tilde{{\tilde{{u}}}}}}_{z} \tilde{{\tilde{{\tilde{{p}}}}}}_{\rm w} \tilde{{\tilde{{\tilde{{p}}}}}}_{\rm a} }\right]^{\rm T}= \\ \quad{\varTheta }\left[ {D_{1} {\rm e}^{\sqrt {\gamma_{1} } \cdot z}\ D_{2} {\rm e}^{\sqrt {\gamma_{2} } \cdot z}\ \cdots\ D_{5} {\rm e}^{\sqrt{\gamma_{5} } \cdot z}} \right]^{\rm T}+ \\ \quad{\varTheta }\left[ {D_{6}{\rm e}^{-\sqrt {\gamma_{1} } \cdot z}\ D_{7} {\rm e}^{-\sqrt {\gamma_{2} } \cdot z}\ \cdots\ D_{10} {\rm e}^{-\sqrt {\gamma_{5} } \cdot z}} \right]^{\rm T}\qquad \end{align}$
(12) $\left. {\begin{array}{l} \tilde{{\tilde{{\tilde{{\sigma }}}}}}_{z} ={i}\lambda \left( {\xi \tilde{{\tilde{{\tilde{{u}}}}}}_{x} +\eta \tilde{{\tilde{{\tilde{{u}}}}}}_{y} } \right)+\left( {\lambda +2\mu } \right)\tilde{{\tilde{{\tilde{{u}}}}}}_{z}^{\prime }-\\ \alpha \chi \tilde{{\tilde{{\tilde{{p}}}}}}_{\rm w} -\alpha \left( {1-\chi } \right)\tilde{{\tilde{{\tilde{{p}}}}}}_{\rm a} \\ \tilde{{\tilde{{\tilde{{\sigma }}}}}}_{xz} =\mu \left( {i\xi \tilde{{\tilde{{\tilde{{u}}}}}}_{z} +\tilde{{\tilde{{\tilde{{u}}}}}}_{x} ^{\prime }} \right),\ \tilde{{\tilde{{\tilde{{\sigma }}}}}}_{yz} =\mu \left( {i\eta \tilde{{\tilde{{\tilde{{u}}}}}}_{z} +\tilde{{\tilde{{\tilde{{u}}}}}}_{y}^{\prime }} \right) \\ \end{array}} \right\}$
式中,$\varTheta$为特征向量矩阵;$\pm\gamma_{1}$,$\pm\gamma_{2}$, $\ldots$, $\pm\gamma_{5}$为矩阵$\varTheta$对应的特征根;$D_{1}$$\sim$$D_{10}$为积分常数,通过边界条件确定。
3 饱和土控制方程及求解
3.1 饱和土控制方程
(13) $\left. {\begin{array}{l} \mu^{{\ast}}\nabla^{2}{u}^{{\ast}}+\left( {\lambda^{{\ast}}+\mu^{{\ast}}} \right)\nabla \theta^{{\ast}}-\nabla p^{\ast }=\\ \rho^{\ast }{\ddot{{u}}}^{{\ast}}+\rho _{\rm w} {w}^{{\ast}} \\ -p^{\ast }=\rho_{\rm w} \ddot{{u}}_{i}^{\ast } +\dfrac{\rho_{\rm w} }{n}\ddot{{w}}_{i}^{\ast } +\dfrac{\rho_{\rm w} g}{k_{\rm w}^{\ast } }\dot{{w}}_{i}^{\ast } \\ \end{array}} \right\}$
(14) $\sigma_{ij}^{\ast } =2\mu^{\ast }\varepsilon_{ij}^{\ast } +\lambda^{\ast }\delta_{ij} \theta^{\ast }-\delta_{ij} \alpha p^{\ast }$
(15) $-p^{\ast }=\alpha M\nabla \cdot {\dot{{u}}}^{\ast }+M\nabla \cdot {\dot{{w}}}^{\ast }$
式中各参数定义参见文献[16 ],其中上标“*”表示饱和土对应的物理量。
3.2 饱和土控制方程求解
采用与非饱和土相同的求解方法,同样利用Fourier变换和散度运算求解饱和土控制方程,再采用降阶法求解常微分方程组可得出饱和土的通解。此处,直接给出饱和土在变换域中的位移、孔隙压力和应力通解。
(16) $\left[ {\tilde{{\tilde{{\tilde{{u}}}}}}_{x}^{\ast } \ \tilde{{\tilde{{\tilde{{u}}}}}}_{y}^{\ast }\ \tilde{{\tilde{{\tilde{{u}}}}}}_{z}^{\ast }\ \tilde{{\tilde{{\tilde{{p}}}}}}^{\ast }} \right]^{\rm T}={\varXi}\Big[ D_{11} {\rm e}^{\sqrt {\gamma_{1}^{\ast } } \cdot z}\ D_{12} {\rm e}^{\sqrt {\gamma_{2}^{\ast } } \cdot z} \quad D_{13} {\rm e}^{\sqrt {\gamma_{3}^{\ast } } \cdot z}\ D_{14} {\rm e}^{\sqrt {\gamma_{4}^{\ast } } \cdot z} \Big]^{\rm T}$
(17) $\left. {\begin{array}{l} \tilde{{\tilde{{\tilde{{\sigma }}}}}}_{z}^{\ast } ={i}\lambda^{\ast }\left({\xi \tilde{{\tilde{{\tilde{{u}}}}}}_{x}^{\ast } +\eta \tilde{{\tilde{{\tilde{{u}}}}}}_{y}^{\ast } } \right)+\left( {\lambda^{\ast}+2\mu^{\ast }} \right)\tilde{{\tilde{{\tilde{{u}}}}}}_{z}^{\ast\prime }-\tilde{{\tilde{{\tilde{{p}}}}}}^{\ast } \\ \tilde{{\tilde{{\tilde{{\sigma }}}}}}_{xz}^{\ast } =\mu^{\ast }\left({i\xi \tilde{{\tilde{{\tilde{{u}}}}}}_{z}^{\ast }+\tilde{{\tilde{{\tilde{{u}}}}}}_{x}^{\ast \prime }}\right),\ \tilde{{\tilde{{\tilde{{\sigma }}}}}}_{yz}^{\ast } =\mu \left({i\eta \tilde{{\tilde{{\tilde{{u}}}}}}_{z}^{\ast }+\tilde{{\tilde{{\tilde{{u}}}}}}_{y}^{\ast \prime }} \right) \\ \end{array}} \right\}\qquad$
式中,$\varXi$为特征向量矩阵;$\gamma_{1}^{\ast }$,$\gamma_{2}^{\ast }$,$\gamma_{3}^{\ast}$,$\gamma_{4}^{\ast }$为矩阵$\varXi$对应的负的特征根,因为,由于下层饱和土为无限半空间,因此求解饱和土控制方程时应根据波的辐射条件将正指数项舍去;$D_{11}$$\sim$$D_{14}$为积分常数,通过边界条件确定。
4 边界问题
4.1 矩形移动荷载的数学描述
对于半空间顶面作用的移动矩形分布荷载$Q$,利用Heaviside阶跃函数将其写为
(18) $Q=H\left( {a-\left| {x-ct} \right|} \right)\cdot H\left( {b-\left| y\right|} \right)\cdot q_{0}$
式中,$H$( )表示Heaviside阶跃函数;$q_{0} $为荷载集度。
(19) $\tilde{{\tilde{{\tilde{{Q}}}}}}=4\pi \left[ {\delta \left( {s-\xi c} \right)+\delta \left( {s+\xi c} \right)} \right]\cdot \\ \dfrac{\sin \left( {a\xi } \right)\sin \left( {b\eta } \right)}{\xi \eta }\cdot q_{0}$
式中,$\delta $( )表示Dirac-delta函数。
4.2 边界条件
地表为透水、透气边界,则半空间表面($z=0$)处的边界条件为
(20) $\left. {\begin{array}{l} \sigma_{z} \left( {x,y,0,t} \right)=Q\left( {x,y,t} \right) \\ \sigma_{xz} \left( {x,y,0,t} \right)=0,\sigma_{yz} \left( {x,y,0,t}\right)=0 \\ p_{\rm w} \left( {x,y,0,t} \right)=0,p_{\rm a} \left( {x,y,0,t} \right)=0 \\ \end{array}} \right\}$
由于下层为饱和土,所以上层非饱和土中的水、气不能向下渗透,故土层交界面($z=H$)处的连续条件为
(21) $\left. {\begin{array}{l} u_{x} =u_{x}^{\ast },\ u_{y} =u_{y}^{\ast },\ u_{z} =u_{z}^{\ast}\\ \sigma _{z} =\sigma_{z}^{\ast },\ \sigma_{xz} =\sigma_{xz}^{\ast },\ \sigma_{yz} =\sigma_{yz}^{\ast }\\\chi p_{\rm w} +\left( {1-\chi }\right)p_{\rm a} =p^{\ast},\ \dfrac{\partial p_{\rm w} }{\partial z}=0,\ \dfrac{\partial p_{\rm a} }{\partial z}=0 \\ \end{array}} \right\}$
4.3 边界方程求解
通过边界条件和连续条件组成的14个方程可确定出积分常数$D_{1}$$\sim$$D_{14}$。对式(20)和式(21)做三重Fourier变换,再将饱和土和非饱和土的位移、应力和孔压的通解代入,并分别取$z=$0,$z=H$,得到关于$D_{1}$$\sim$$D_{14}$的线性方程组
(22) ${\varPhi }\cdot \left[ {D_{1},D_{2},\cdots D_{14} } \right]^{\rm T}=\left[ {\tilde{{\tilde{{\tilde{{Q}}}}}},0,\cdots, 0} \right]^{\rm T}$
式中, $\varPhi $为$14\times14$的系数矩阵,其矩阵元素 $\varPhi_{11}$$\sim$$\varPhi_{1414}$见附录。利用矩阵运算可确定出$D_{1}$$\sim$$D_{14}$的结果为
(23) $\left[ {D_{1},D_{2},\cdots D_{14} } \right]^{\rm T}={\varPhi }^{-1}\left[ {\tilde{{\tilde{{\tilde{{Q}}}}}},0,\cdots, 0} \right]^{\rm T}$
至此,系统中所有参数均已确定。将$D_{1}$$\sim$$D_{14}$回代到式(11)、式(12)和式(16)、式(17),即可计算出非饱和土层和饱和土层中的位移、应力和孔隙压力。对计算结果做Fourier逆变换,可得到时间-空间域中各场量的计算结果。
5 验证与分析
5.1 算法验证
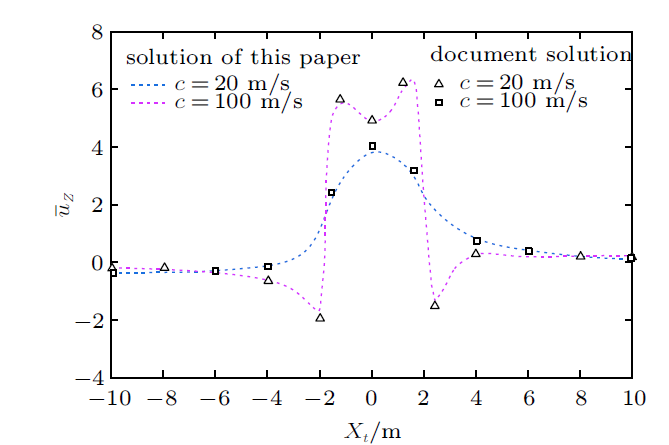
对前文推导结果进行编程计算,关于式(11)、式(12)和式(16)、式(17)的Fourier逆变换可通过数值积分或离散Fourier逆变换实现,本文中采用计算效率较高的离散Fourier逆变换实现。引入移动坐标轴$X_t$,$X_t=x-ct$,使计算结果能以振源为中心分布。取上层非饱和土的饱和度$S_{\rm r}=1$,则半空间地基退化为单一饱和半空间,此时,有效应力参数$\chi=1$。则上、下层土体的特性参数值相同,土体参数取值与文献[16 ]相同,按文献[16 ]给定计算参数进行取值计算,其中主要参数的取值有:Lamb常数$\mu$取30 MPa,$n$取0.3;非饱和土中固体和水的质量密度$\rho_{\rm s}$和$\rho_{\rm w}$的取值分别为2700 kg/m$^{3}$和1000 kg/m$^{3}$。图2 为本文退化解与单层饱和半空间模型[16 ]的结果对比,图中显示,退化解与文献解能够很好地吻合。(图中$\bar{{u}}_{z}$为无量纲竖向位移,$\bar{{u}}_{z} ={{u_{z} \mu^{\ast }}/{\left( {aq_{0} }\right)}}$。)
图2
图2
退化计算及结果对比 ($q_{0}=60$ kN/m$^{2}$, $a=2$ m, $b=1$ m)
Fig. 2
Calculation of degradation and comparison of results ($q_{0}=60$ kN/m$^{2}$, $a=$2 m, $b=1$ m)
5.2 算例分析
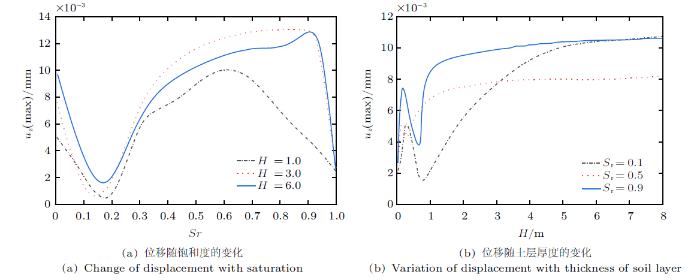
图3 为移动荷载作用下地表($z=0$)竖向位移的空间分布。图4 为地表位移峰值沿上层非饱和土体饱和度和土层厚度的变化规律曲线。图4 (a)显示:当非饱和土层饱和度小于0.15时,地表位移峰值随饱和度的增大而急速减小,当非饱和土层饱和度大于0.15时则随之增大,当非饱和土层饱和度接近0.9时(趋于完全饱和)则再次急速减小,曲线的拐点位置随非饱和土层的厚度发生变化。图4 (b)显示:当非饱和土层的厚度小于0.5 m时,地表振动位移发生剧烈波动。当非饱和土层的厚度大于0.5 m时,随着非饱和土层的厚度增大,地表位移也随之增大。但当非饱和土层达到一定厚度后,振动位移将收敛于恒定值,该收敛值与单层非饱和地基的结果一致,说明地基完全体现为单层非饱和土地基,不再受下部饱和土层的影响,该临界厚度与土体饱和度相关,还能看出当地基上层土体为中度饱和时,层状土对地表位移峰值的影响较小。
图3
图3
地表竖向位移空间分布($z=0$)
Fig. 3
Spatial distribution of vertical ground displacement ($z=0$)
图4
图4
地表位移峰值沿上层非饱和土体饱和度和土层厚度的变化
Fig. 4
Variation of peak surface displacement along upper unsaturated soil saturation and soil thickness
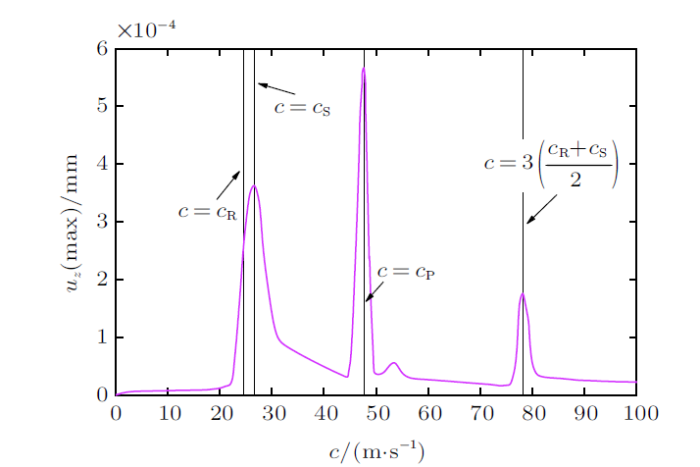
图5 为竖向振动峰值与速度的关系曲线,从图中可以看出,当荷载移动速度小于$c_{\rm R}$时,竖向振动峰值很小,随着速度的增大竖向振动峰值发生小幅增涨,但当荷载速度达到$c_{\rm R}$时,竖向振动发生激增,当速度等于$c_{\rm S}$时出现第一个峰点。随着速度进一步增大,在$c=c_{\rm P}$,$c=3\left[(c_{\rm R} +c_{\rm S})/{2}\right]$时,再次出现峰点,且$c=c_{\rm P}$时为最大峰值点。其中:$c_{\rm S}$为地震横波波速,$c_{\rm S}=\sqrt{{E}/[{2\rho \left( {1+\nu } \right)}]}$;$c_{\rm P}$为地震纵波波速,$c_{\rm P} =\sqrt{{E\left( {1-\nu } \right)}/[{\rho\left( {1+\nu } \right)\left( {1-2\nu } \right)}]}$;$c_{\rm R}$为瑞利波速,$c_{\rm R} =({0.862+1.14\nu })/({1+\nu })\cdot c_{\rm S}$;式中,$E$,$\nu $为弹性常数,$\rho $为介质密度。
图5
图5
竖向振动峰值与速度的关系曲线
Fig. 5
Curve of relationship between peak value of vertical vibration and velocity
6 结论
将地基考虑为饱和-非饱和土双层半空间,利用Dirac-delta函数和Heaviside阶跃函数将矩形移动荷载描述为时间和空间坐标的解析函数,采用三重Fourier变换和降阶法推导出矩形移动荷载作用下饱和-非饱和土双层地基中各场量的解析解。通过算例分析,总结出以下结论。
(1) 随着上层非饱和土厚度的增大,地表振动位移也随之增大,层厚处于0$\sim$0.5 m时,地表振动位移发生剧烈波动。
(2) 地基上层土体为中度饱和时,层状土的影响将减小。
(3) 当荷载移动速度小于瑞利波速时,竖向振动峰值很小,振幅随速度的增大发生小幅增涨,但当荷载速度达到瑞利波速时,竖向振动发生激增;随着速度进一步增大,竖向位移多次出现峰点。
附录
$ \begin{align} \varPhi_{1j} ={i}\lambda \left( {\xi \phi_{1j} +\eta \phi_{2j} } \right)+r_{k}\left( {\lambda +2\mu } \right)\phi_{3j} -\alpha \chi \phi_{4j} - \\ \alpha\left( {1-\chi } \right)\cdot\phi_{5j}\ (j=1,2,\ldots, 14; k=1,2,\ldots, 10;\\ j=11,12,\ldots, 14, \varPhi_{1j}=0); \end{align} $
$\varPhi_{2j} =\mu \left( {i\xi \phi_{3j} +r_{k} \phi_{1j} } \right)\ (j=1,2,\ldots, 14; k=1,2,\ldots, 10;\\ j=11,12,\ldots, 14, \varPhi_{ij} =0);$
$\varPhi_{3j} =\mu \left( {i\eta \phi_{3j} +r_{k} \phi_{2j} }\right)\ (j=1,2,\ldots, 14; k=1,2,\ldots, 10;\\ j=11,12,\ldots, 14, \varPhi_{ij} =0);$
$\varPhi_{ij} =\phi_{ij}\ (i=4,5; j=1,2,\ldots, 14; j=11,12,\ldots, 14,\\ \varPhi_{ij} =0);$
$\begin{align} \varPhi_{ij} =\left\{ {\begin{array}{ll} \phi_{i-5,j} {\rm e}^{r_{k} H} & \left( {j=1,2,..., 10;k=1,2,..., 10} \right) \\ -\phi_{i-5,j}^{\ast } {\rm e}^{r_{k}^{\ast } H}& \left( {j=11,12,..., 14;k=1,2,..., 4} \right) \\ \end{array}} \right. \\ (i=6,7,8); \end{align}$
$\varPhi_{ij} =\left\{ \begin{array}{l} \phi_{i-8,j} {\rm e}^{r_{k} H}\\ \left( {i=9,10,11;j=1,2,..., 10;k=1,2,..., 10} \right) \\ \left.\begin{array}{l} -\Big[ {i}\lambda^{\ast }\left( {\xi \phi_{i-8,j-10}^{\ast } +\eta \phi_{i-7,j-10}^{\ast } } \right)+\\ r_{k}^{\ast } \left( {\lambda^{\ast }+2\mu^{\ast }} \right)\phi_{i-6,j-10}^{\ast } - \\ \phi_{i-5,j-10}^{\ast }\Big]{\rm e}^{r_{k}^{\ast } H}\\ \left( {i=9} \right) \\ -\mu^{\ast }\Big( i\xi \phi_{i-7,j-10}^{\ast } +\\ r_{k}^{\ast } \phi_{i-9,j-10}^{\ast } \Big){\rm e}^{r_{k}^{\ast } H}\ \left( {i=10} \right) -\mu^{\ast }\Big( i\eta \phi_{i-8,j-10}^{\ast } +\\ r_{k}^{\ast } \phi_{i-9,j-10}^{\ast } \Big){\rm e}^{r_{k}^{\ast } H}\ \left( {i=11} \right) \end{array}\right\} \\ \left( {j=11,12,..., 14;k=1,2,..., 4} \right) \end{array} \right.;$
$\varPhi_{ij} =\left\{ {\begin{array}{l} \left[ {\chi \phi_{i-8,j} +\left( {1-\chi } \right)\phi_{i-7,j} } \right]{\rm e}^{r_{k} H}\\ \left( {j=1,2,..., 10;k=1,2,..., 10} \right) \\ -\phi_{i-8,j-10}^{\ast } \cdot {\rm e}^{r_{k}^{\ast } H}\\ \left( {j=11,12,..., 14;k=1,2,..., 4} \right) \\ \end{array}} \right.\ (i=12);$
$\begin{align} \varPhi_{ij} =r_{k} \phi_{i-9,j} \cdot {\rm e}^{r_{k}H}\ (i=13,14; j=1,2,\ldots, 14;\\ k=1,2,\ldots, 10; \mbox{当} j=11,12,\ldots, 14\mbox{时}, \varPhi_{ij}=0)\\ (r_{1}=-r_{2}, r_{3}=-r_{4}, r_{5}=-r_{6}, r_{7}=-r_{8}, r_{9}=-r_{10}). \end{align}$
参考文献
View Option
[1]
Biot MA . Theory of propagation of elastic waves in a fluid-saturated porous solid II. Higher frequency range
Journal of the Acoustical Society of America 1956 , 28 (2 ): 179 -191
DOI
URL
[本文引用: 1]
[2]
袁宗浩 , 蔡袁强 , 曾晨 . 地铁列车荷载作用下轨道系统及饱和土体动力响应分析
岩石力学与工程学报 , 2015 , 34 (7 ): 1470 -1479
Yuan Zonghao Cai Yuanqiang Zeng Chen . Analysis of dynamic response of track system and saturated soil under subway train load
Chinese Journal of Rock Mechanics and Engineering 2015 , 34 (7 ): 1470 -1479 (in Chinese)
[3]
王立安 , 赵建昌 , 王作伟 . 汽车行驶诱发地表振动的解析研究
力学学报 , 2020 , 52 (5 ): 1509 -1518
DOI
本文从汽车动力学出发,建立 1/4 汽车与半空间地基耦合振动的动力学模型,并采用弹性滚子接触模型来反映轮胎包容性. 模型中同时考虑轮-地之间的纵向和竖向作用力,构建系统动力控制方程,利用 Fourier 和 Laplace 积分变换进行求解,推导出地表振动位移的解析解. 在数值算例中,利用离散傅里叶逆变换和 Crump 法进行数值反演,得出地表振动位移的空间分布,由此讨论了轮胎着地长度和轮-地相互作用力的变化规律,并对地表振动位移的参数影响作出分析. 结果表明,地面不平度对轮-地之间作用力的影响最为显著,地面越不平顺则轮-地作用力和地表振动位移越大. 车速对轮-地作用力的大小影响有限,但对载荷激励频率影响较大,车速增大则激励频率增大,地表振动位移随之增大. 在较低车速时,轮胎包容性对轮-地作用力和地表振动产生一定影响,轮胎充气压力增大,轮-地作用力和地表振动位移增大,但随着车速升高,这种影响将逐渐消失.
Wang Li'an Zhao Jianchang Wang Zuowei . Analytical study on ground vibration induced by moving vehicle
Chinese Journal of Theoretical and Applied Mechanics 2020 , 52 (5 ): 1509 -1518 (in Chinese)
DOI
Based on vehicle dynamics, the coupling vibration model between vehicle and ground is established, and the contact model of elastic roller is adopted to reflect the tyre tolerance. At the same time, the longitudinal and vertical forces between the wheel and the ground are considered, the system dynamic control equation is constructed, and the analytical solution of the surface vibration displacement is obtained by using Fourier and Laplace integral transformation. In the numerical example, the inverse discrete Fourier transform and Crump's method are used to do the numerical inversion, and the time domain solution of the surface vibration displacement is obtained, the influence of the parameters of the surface vibration displacement is analyzed. The results show that the surface irregularity has the most significant influence on the wheel-earth interaction, and the more uneven the ground, the greater the wheel-earth interaction and the greater the surface vibration displacement. The influence of vehicle speed on the wheel-ground force is limited, but it has a great influence on the excitation frequency of load. When vehicle speed increases, the excitation frequency increases, and the surface vibration displacement increases accordingly. At a low speed, tire inclusivity has a certain effect on the wheel-ground force and surface vibration. With the increase of tire inflation pressure, the wheel-ground force and surface vibration displacement increase, but with the increase of speed, this effect will gradually disappear.
[4]
Shan QL Jin Y Chen M , et al . A new finite element method to predict the fracture initiation pressure
Journal of Natural Gas Science and Engineering 2017 , 43 (3 ): 58 -68
DOI
URL
[本文引用: 1]
[5]
徐斌 , 陆建飞 , 王建华 等 . 移动荷载作用下层状饱和土的动力响应
岩土力学 , 2008 , 29 (12 ): 3186 -3192
[本文引用: 1]
Xu Bin Lu Jianfei Wang Jianhua , et al . Dynamic response of layered saturated soil under moving loads
Rock and Soil Mechanics 2008 , 29 (12 ): 3186 -3192 (in Chinese)
[本文引用: 1]
[6]
王立安 , 赵建昌 , 余云燕 . 瑞利波在非均匀饱和地基中的传播特性
岩土力学 , 2020 , 41 (6 ): 1983 -1990, 2000
[本文引用: 1]
Wang Li'an Zhao Jianchang Yu Yunyan . Propagation characteristics of Rayleigh wave in inhomogeneous saturated soil
Rock and Soil Mechanics 2020 , 41 (6 ): 1983 -1990, 2000 (in Chinese)
[本文引用: 1]
[7]
徐长节 , 徐良英 , 杨园野 . 三相非饱和土参数对波的传播的影响研究
岩土力学 , 2015 , 36 (S2 ): 340 -344
[本文引用: 1]
Xu Changjie Xu Liangying Yang Yuanye . Influence of parameters of three-phase unsaturated soil on wave propagation
Rock and Soil Mechanics 2015 , 36 (S2 ): 340 -344 (in Chinese)
[本文引用: 1]
[8]
周凤玺 , 柳鸿博 . 非饱和土中Rayleigh波的传播特性分析
岩土力学 , 2019 , 40 (8 ): 3218 -3273
[本文引用: 1]
Zhou Fengxi Liu Hongbo . Propagation characteristics of Rayleigh waves in unsaturated soils
Rock and Soil Mechanics 2019 , 40 (8 ): 3218 -3273 (in Chinese)
[本文引用: 1]
[9]
Vardoulakis I Beskos DE . Dynamic behavior of nearly saturated porous media
Mechanics of Materials 1986 , 5 (1 ): 87 -108
DOI
URL
[本文引用: 1]
[10]
李绍毅 . 土体饱和度对移动荷载引起多层非饱和铁路地基振动的影响
岩土力学 , 2021 , 42 (1 ): 151 -159, 167
[本文引用: 1]
Li Shaoyi . Influence of soil saturation on vibration of multi-layer unsaturated railway foundation caused by moving load
Rock and Soil Mechanics 2021 , 42 (1 ): 151 -159, 167 (in Chinese)
[本文引用: 1]
[11]
Lu Z Fang R Yao HL , et al . Dynamic responses of unsaturated half-space soil to a moving harmonic rectangular load
International Journal for Numerical and Analytical Methods in Geomechanics 2018 , 42 (9 ): 1057 -1077
DOI
URL
[本文引用: 2]
[12]
Fang R Lu Z Yao HL , et al . Study on dynamic responses of unsaturated railway subgrade subjected to moving train load
Soil Dynamics and Earthquake Engineering 2018 , 115 : 319 -323
DOI
URL
[本文引用: 3]
[13]
Song W Zou DJ Liu TJ , et al . Dynamic response of unsaturated full-space caused by a circular tunnel subjected to a vertical harmonic point load
Soil Dynamics and Earthquake Engineering 2020 , 130 : 106005
DOI
URL
[本文引用: 4]
[14]
吴幼明 , 王向东 , 岳珠峰 . 一类二阶微分方程组的通解
汕头大学学报(自然科学版) , 2007 , 22 (3 ): 15 -20
[本文引用: 1]
Wu Youming Wang Xiangdong Yue Zhufeng . General solution of a class of second order differential equation
Journal of Shantou University (Natural Science) 2007 , 22 (3 ): 15 -20 (in Chinese)
[本文引用: 1]
[15]
吴幼明 , 卢永全 , 杜焕芬 . 一类二阶常微分方程组的通解
佛山科学技术学院学报(自然科学版) , 2009 , 27 (5 ): 18 -22
[本文引用: 1]
Wu Youming Lu yongquan Du huanfen . General solution of a class of second order differential equations
Journal of the Foshan University (Natural Science) 2009 , 27 (5 ): 18 -22 (in Chinese)
[本文引用: 1]
[16]
Cai YQ Sun HL Xu CJ . Steady state responses of poroelastic half-space soil medium to a moving rectangular load
International Journal of Solids and Structures 2007 , 44 (22 ): 7183 -7196
DOI
URL
[本文引用: 5]
Theory of propagation of elastic waves in a fluid-saturated porous solid II. Higher frequency range
1
1956
... 地基在移动荷载作用下的动力响应一直是岩土工程和交通工程领域的重点关注课题.随着运输业的发展,车辆的行驶速度越来越快,载重也越来越大,在此背景下研究地基土在移动荷载作用下动力响应问题对于道路结构设计和环境振动影响分析都具有重要意义.地基土体是一种具有多相组成和骨架孔隙结构的复杂介质,在动力作用下由于土体内部存在多场耦合效应,使其动力响应分析变得非常复杂.将地基土体视为固体骨架和孔隙水组成的两相饱和介质,利用Biot多孔介质波动理论进行动力响应分析已经相当成熟[1 -4 ] .徐斌等[5 ] 根据Biot波动理论,采用传递、反射矩阵方法研究了移动荷载作用下层状饱和土动力响应问题.王立安等[6 ] 对非均匀饱和地基的动力特性做了研究.徐长节等[7 ] 和周凤玺等[8 ] 基于Vardoulakis等[9 ] 的理论研究了非饱和土中波的传播规律.李绍毅[10 ] 采用半解析法研究了移动荷载作用下多层非饱和铁路地基的共振问题,分析了土体饱和度对非饱和地基振动的影响.Lu等[11 ] 研究了矩形移动荷载作用下非饱和地基的动力响应.Fang等[12 ] 研究了列车荷载作用下非饱和地基的振动响应.Song等[13 ] 对埋置荷载作用下的非饱和地基动力响应问题做了研究. ...
地铁列车荷载作用下轨道系统及饱和土体动力响应分析
0
2015
地铁列车荷载作用下轨道系统及饱和土体动力响应分析
0
2015
A new finite element method to predict the fracture initiation pressure
1
2017
... 地基在移动荷载作用下的动力响应一直是岩土工程和交通工程领域的重点关注课题.随着运输业的发展,车辆的行驶速度越来越快,载重也越来越大,在此背景下研究地基土在移动荷载作用下动力响应问题对于道路结构设计和环境振动影响分析都具有重要意义.地基土体是一种具有多相组成和骨架孔隙结构的复杂介质,在动力作用下由于土体内部存在多场耦合效应,使其动力响应分析变得非常复杂.将地基土体视为固体骨架和孔隙水组成的两相饱和介质,利用Biot多孔介质波动理论进行动力响应分析已经相当成熟[1 -4 ] .徐斌等[5 ] 根据Biot波动理论,采用传递、反射矩阵方法研究了移动荷载作用下层状饱和土动力响应问题.王立安等[6 ] 对非均匀饱和地基的动力特性做了研究.徐长节等[7 ] 和周凤玺等[8 ] 基于Vardoulakis等[9 ] 的理论研究了非饱和土中波的传播规律.李绍毅[10 ] 采用半解析法研究了移动荷载作用下多层非饱和铁路地基的共振问题,分析了土体饱和度对非饱和地基振动的影响.Lu等[11 ] 研究了矩形移动荷载作用下非饱和地基的动力响应.Fang等[12 ] 研究了列车荷载作用下非饱和地基的振动响应.Song等[13 ] 对埋置荷载作用下的非饱和地基动力响应问题做了研究. ...
移动荷载作用下层状饱和土的动力响应
1
2008
... 地基在移动荷载作用下的动力响应一直是岩土工程和交通工程领域的重点关注课题.随着运输业的发展,车辆的行驶速度越来越快,载重也越来越大,在此背景下研究地基土在移动荷载作用下动力响应问题对于道路结构设计和环境振动影响分析都具有重要意义.地基土体是一种具有多相组成和骨架孔隙结构的复杂介质,在动力作用下由于土体内部存在多场耦合效应,使其动力响应分析变得非常复杂.将地基土体视为固体骨架和孔隙水组成的两相饱和介质,利用Biot多孔介质波动理论进行动力响应分析已经相当成熟[1 -4 ] .徐斌等[5 ] 根据Biot波动理论,采用传递、反射矩阵方法研究了移动荷载作用下层状饱和土动力响应问题.王立安等[6 ] 对非均匀饱和地基的动力特性做了研究.徐长节等[7 ] 和周凤玺等[8 ] 基于Vardoulakis等[9 ] 的理论研究了非饱和土中波的传播规律.李绍毅[10 ] 采用半解析法研究了移动荷载作用下多层非饱和铁路地基的共振问题,分析了土体饱和度对非饱和地基振动的影响.Lu等[11 ] 研究了矩形移动荷载作用下非饱和地基的动力响应.Fang等[12 ] 研究了列车荷载作用下非饱和地基的振动响应.Song等[13 ] 对埋置荷载作用下的非饱和地基动力响应问题做了研究. ...
移动荷载作用下层状饱和土的动力响应
1
2008
... 地基在移动荷载作用下的动力响应一直是岩土工程和交通工程领域的重点关注课题.随着运输业的发展,车辆的行驶速度越来越快,载重也越来越大,在此背景下研究地基土在移动荷载作用下动力响应问题对于道路结构设计和环境振动影响分析都具有重要意义.地基土体是一种具有多相组成和骨架孔隙结构的复杂介质,在动力作用下由于土体内部存在多场耦合效应,使其动力响应分析变得非常复杂.将地基土体视为固体骨架和孔隙水组成的两相饱和介质,利用Biot多孔介质波动理论进行动力响应分析已经相当成熟[1 -4 ] .徐斌等[5 ] 根据Biot波动理论,采用传递、反射矩阵方法研究了移动荷载作用下层状饱和土动力响应问题.王立安等[6 ] 对非均匀饱和地基的动力特性做了研究.徐长节等[7 ] 和周凤玺等[8 ] 基于Vardoulakis等[9 ] 的理论研究了非饱和土中波的传播规律.李绍毅[10 ] 采用半解析法研究了移动荷载作用下多层非饱和铁路地基的共振问题,分析了土体饱和度对非饱和地基振动的影响.Lu等[11 ] 研究了矩形移动荷载作用下非饱和地基的动力响应.Fang等[12 ] 研究了列车荷载作用下非饱和地基的振动响应.Song等[13 ] 对埋置荷载作用下的非饱和地基动力响应问题做了研究. ...
瑞利波在非均匀饱和地基中的传播特性
1
2020
... 地基在移动荷载作用下的动力响应一直是岩土工程和交通工程领域的重点关注课题.随着运输业的发展,车辆的行驶速度越来越快,载重也越来越大,在此背景下研究地基土在移动荷载作用下动力响应问题对于道路结构设计和环境振动影响分析都具有重要意义.地基土体是一种具有多相组成和骨架孔隙结构的复杂介质,在动力作用下由于土体内部存在多场耦合效应,使其动力响应分析变得非常复杂.将地基土体视为固体骨架和孔隙水组成的两相饱和介质,利用Biot多孔介质波动理论进行动力响应分析已经相当成熟[1 -4 ] .徐斌等[5 ] 根据Biot波动理论,采用传递、反射矩阵方法研究了移动荷载作用下层状饱和土动力响应问题.王立安等[6 ] 对非均匀饱和地基的动力特性做了研究.徐长节等[7 ] 和周凤玺等[8 ] 基于Vardoulakis等[9 ] 的理论研究了非饱和土中波的传播规律.李绍毅[10 ] 采用半解析法研究了移动荷载作用下多层非饱和铁路地基的共振问题,分析了土体饱和度对非饱和地基振动的影响.Lu等[11 ] 研究了矩形移动荷载作用下非饱和地基的动力响应.Fang等[12 ] 研究了列车荷载作用下非饱和地基的振动响应.Song等[13 ] 对埋置荷载作用下的非饱和地基动力响应问题做了研究. ...
瑞利波在非均匀饱和地基中的传播特性
1
2020
... 地基在移动荷载作用下的动力响应一直是岩土工程和交通工程领域的重点关注课题.随着运输业的发展,车辆的行驶速度越来越快,载重也越来越大,在此背景下研究地基土在移动荷载作用下动力响应问题对于道路结构设计和环境振动影响分析都具有重要意义.地基土体是一种具有多相组成和骨架孔隙结构的复杂介质,在动力作用下由于土体内部存在多场耦合效应,使其动力响应分析变得非常复杂.将地基土体视为固体骨架和孔隙水组成的两相饱和介质,利用Biot多孔介质波动理论进行动力响应分析已经相当成熟[1 -4 ] .徐斌等[5 ] 根据Biot波动理论,采用传递、反射矩阵方法研究了移动荷载作用下层状饱和土动力响应问题.王立安等[6 ] 对非均匀饱和地基的动力特性做了研究.徐长节等[7 ] 和周凤玺等[8 ] 基于Vardoulakis等[9 ] 的理论研究了非饱和土中波的传播规律.李绍毅[10 ] 采用半解析法研究了移动荷载作用下多层非饱和铁路地基的共振问题,分析了土体饱和度对非饱和地基振动的影响.Lu等[11 ] 研究了矩形移动荷载作用下非饱和地基的动力响应.Fang等[12 ] 研究了列车荷载作用下非饱和地基的振动响应.Song等[13 ] 对埋置荷载作用下的非饱和地基动力响应问题做了研究. ...
三相非饱和土参数对波的传播的影响研究
1
2015
... 地基在移动荷载作用下的动力响应一直是岩土工程和交通工程领域的重点关注课题.随着运输业的发展,车辆的行驶速度越来越快,载重也越来越大,在此背景下研究地基土在移动荷载作用下动力响应问题对于道路结构设计和环境振动影响分析都具有重要意义.地基土体是一种具有多相组成和骨架孔隙结构的复杂介质,在动力作用下由于土体内部存在多场耦合效应,使其动力响应分析变得非常复杂.将地基土体视为固体骨架和孔隙水组成的两相饱和介质,利用Biot多孔介质波动理论进行动力响应分析已经相当成熟[1 -4 ] .徐斌等[5 ] 根据Biot波动理论,采用传递、反射矩阵方法研究了移动荷载作用下层状饱和土动力响应问题.王立安等[6 ] 对非均匀饱和地基的动力特性做了研究.徐长节等[7 ] 和周凤玺等[8 ] 基于Vardoulakis等[9 ] 的理论研究了非饱和土中波的传播规律.李绍毅[10 ] 采用半解析法研究了移动荷载作用下多层非饱和铁路地基的共振问题,分析了土体饱和度对非饱和地基振动的影响.Lu等[11 ] 研究了矩形移动荷载作用下非饱和地基的动力响应.Fang等[12 ] 研究了列车荷载作用下非饱和地基的振动响应.Song等[13 ] 对埋置荷载作用下的非饱和地基动力响应问题做了研究. ...
三相非饱和土参数对波的传播的影响研究
1
2015
... 地基在移动荷载作用下的动力响应一直是岩土工程和交通工程领域的重点关注课题.随着运输业的发展,车辆的行驶速度越来越快,载重也越来越大,在此背景下研究地基土在移动荷载作用下动力响应问题对于道路结构设计和环境振动影响分析都具有重要意义.地基土体是一种具有多相组成和骨架孔隙结构的复杂介质,在动力作用下由于土体内部存在多场耦合效应,使其动力响应分析变得非常复杂.将地基土体视为固体骨架和孔隙水组成的两相饱和介质,利用Biot多孔介质波动理论进行动力响应分析已经相当成熟[1 -4 ] .徐斌等[5 ] 根据Biot波动理论,采用传递、反射矩阵方法研究了移动荷载作用下层状饱和土动力响应问题.王立安等[6 ] 对非均匀饱和地基的动力特性做了研究.徐长节等[7 ] 和周凤玺等[8 ] 基于Vardoulakis等[9 ] 的理论研究了非饱和土中波的传播规律.李绍毅[10 ] 采用半解析法研究了移动荷载作用下多层非饱和铁路地基的共振问题,分析了土体饱和度对非饱和地基振动的影响.Lu等[11 ] 研究了矩形移动荷载作用下非饱和地基的动力响应.Fang等[12 ] 研究了列车荷载作用下非饱和地基的振动响应.Song等[13 ] 对埋置荷载作用下的非饱和地基动力响应问题做了研究. ...
非饱和土中Rayleigh波的传播特性分析
1
2019
... 地基在移动荷载作用下的动力响应一直是岩土工程和交通工程领域的重点关注课题.随着运输业的发展,车辆的行驶速度越来越快,载重也越来越大,在此背景下研究地基土在移动荷载作用下动力响应问题对于道路结构设计和环境振动影响分析都具有重要意义.地基土体是一种具有多相组成和骨架孔隙结构的复杂介质,在动力作用下由于土体内部存在多场耦合效应,使其动力响应分析变得非常复杂.将地基土体视为固体骨架和孔隙水组成的两相饱和介质,利用Biot多孔介质波动理论进行动力响应分析已经相当成熟[1 -4 ] .徐斌等[5 ] 根据Biot波动理论,采用传递、反射矩阵方法研究了移动荷载作用下层状饱和土动力响应问题.王立安等[6 ] 对非均匀饱和地基的动力特性做了研究.徐长节等[7 ] 和周凤玺等[8 ] 基于Vardoulakis等[9 ] 的理论研究了非饱和土中波的传播规律.李绍毅[10 ] 采用半解析法研究了移动荷载作用下多层非饱和铁路地基的共振问题,分析了土体饱和度对非饱和地基振动的影响.Lu等[11 ] 研究了矩形移动荷载作用下非饱和地基的动力响应.Fang等[12 ] 研究了列车荷载作用下非饱和地基的振动响应.Song等[13 ] 对埋置荷载作用下的非饱和地基动力响应问题做了研究. ...
非饱和土中Rayleigh波的传播特性分析
1
2019
... 地基在移动荷载作用下的动力响应一直是岩土工程和交通工程领域的重点关注课题.随着运输业的发展,车辆的行驶速度越来越快,载重也越来越大,在此背景下研究地基土在移动荷载作用下动力响应问题对于道路结构设计和环境振动影响分析都具有重要意义.地基土体是一种具有多相组成和骨架孔隙结构的复杂介质,在动力作用下由于土体内部存在多场耦合效应,使其动力响应分析变得非常复杂.将地基土体视为固体骨架和孔隙水组成的两相饱和介质,利用Biot多孔介质波动理论进行动力响应分析已经相当成熟[1 -4 ] .徐斌等[5 ] 根据Biot波动理论,采用传递、反射矩阵方法研究了移动荷载作用下层状饱和土动力响应问题.王立安等[6 ] 对非均匀饱和地基的动力特性做了研究.徐长节等[7 ] 和周凤玺等[8 ] 基于Vardoulakis等[9 ] 的理论研究了非饱和土中波的传播规律.李绍毅[10 ] 采用半解析法研究了移动荷载作用下多层非饱和铁路地基的共振问题,分析了土体饱和度对非饱和地基振动的影响.Lu等[11 ] 研究了矩形移动荷载作用下非饱和地基的动力响应.Fang等[12 ] 研究了列车荷载作用下非饱和地基的振动响应.Song等[13 ] 对埋置荷载作用下的非饱和地基动力响应问题做了研究. ...
Dynamic behavior of nearly saturated porous media
1
1986
... 地基在移动荷载作用下的动力响应一直是岩土工程和交通工程领域的重点关注课题.随着运输业的发展,车辆的行驶速度越来越快,载重也越来越大,在此背景下研究地基土在移动荷载作用下动力响应问题对于道路结构设计和环境振动影响分析都具有重要意义.地基土体是一种具有多相组成和骨架孔隙结构的复杂介质,在动力作用下由于土体内部存在多场耦合效应,使其动力响应分析变得非常复杂.将地基土体视为固体骨架和孔隙水组成的两相饱和介质,利用Biot多孔介质波动理论进行动力响应分析已经相当成熟[1 -4 ] .徐斌等[5 ] 根据Biot波动理论,采用传递、反射矩阵方法研究了移动荷载作用下层状饱和土动力响应问题.王立安等[6 ] 对非均匀饱和地基的动力特性做了研究.徐长节等[7 ] 和周凤玺等[8 ] 基于Vardoulakis等[9 ] 的理论研究了非饱和土中波的传播规律.李绍毅[10 ] 采用半解析法研究了移动荷载作用下多层非饱和铁路地基的共振问题,分析了土体饱和度对非饱和地基振动的影响.Lu等[11 ] 研究了矩形移动荷载作用下非饱和地基的动力响应.Fang等[12 ] 研究了列车荷载作用下非饱和地基的振动响应.Song等[13 ] 对埋置荷载作用下的非饱和地基动力响应问题做了研究. ...
土体饱和度对移动荷载引起多层非饱和铁路地基振动的影响
1
2021
... 地基在移动荷载作用下的动力响应一直是岩土工程和交通工程领域的重点关注课题.随着运输业的发展,车辆的行驶速度越来越快,载重也越来越大,在此背景下研究地基土在移动荷载作用下动力响应问题对于道路结构设计和环境振动影响分析都具有重要意义.地基土体是一种具有多相组成和骨架孔隙结构的复杂介质,在动力作用下由于土体内部存在多场耦合效应,使其动力响应分析变得非常复杂.将地基土体视为固体骨架和孔隙水组成的两相饱和介质,利用Biot多孔介质波动理论进行动力响应分析已经相当成熟[1 -4 ] .徐斌等[5 ] 根据Biot波动理论,采用传递、反射矩阵方法研究了移动荷载作用下层状饱和土动力响应问题.王立安等[6 ] 对非均匀饱和地基的动力特性做了研究.徐长节等[7 ] 和周凤玺等[8 ] 基于Vardoulakis等[9 ] 的理论研究了非饱和土中波的传播规律.李绍毅[10 ] 采用半解析法研究了移动荷载作用下多层非饱和铁路地基的共振问题,分析了土体饱和度对非饱和地基振动的影响.Lu等[11 ] 研究了矩形移动荷载作用下非饱和地基的动力响应.Fang等[12 ] 研究了列车荷载作用下非饱和地基的振动响应.Song等[13 ] 对埋置荷载作用下的非饱和地基动力响应问题做了研究. ...
土体饱和度对移动荷载引起多层非饱和铁路地基振动的影响
1
2021
... 地基在移动荷载作用下的动力响应一直是岩土工程和交通工程领域的重点关注课题.随着运输业的发展,车辆的行驶速度越来越快,载重也越来越大,在此背景下研究地基土在移动荷载作用下动力响应问题对于道路结构设计和环境振动影响分析都具有重要意义.地基土体是一种具有多相组成和骨架孔隙结构的复杂介质,在动力作用下由于土体内部存在多场耦合效应,使其动力响应分析变得非常复杂.将地基土体视为固体骨架和孔隙水组成的两相饱和介质,利用Biot多孔介质波动理论进行动力响应分析已经相当成熟[1 -4 ] .徐斌等[5 ] 根据Biot波动理论,采用传递、反射矩阵方法研究了移动荷载作用下层状饱和土动力响应问题.王立安等[6 ] 对非均匀饱和地基的动力特性做了研究.徐长节等[7 ] 和周凤玺等[8 ] 基于Vardoulakis等[9 ] 的理论研究了非饱和土中波的传播规律.李绍毅[10 ] 采用半解析法研究了移动荷载作用下多层非饱和铁路地基的共振问题,分析了土体饱和度对非饱和地基振动的影响.Lu等[11 ] 研究了矩形移动荷载作用下非饱和地基的动力响应.Fang等[12 ] 研究了列车荷载作用下非饱和地基的振动响应.Song等[13 ] 对埋置荷载作用下的非饱和地基动力响应问题做了研究. ...
Dynamic responses of unsaturated half-space soil to a moving harmonic rectangular load
2
2018
... 地基在移动荷载作用下的动力响应一直是岩土工程和交通工程领域的重点关注课题.随着运输业的发展,车辆的行驶速度越来越快,载重也越来越大,在此背景下研究地基土在移动荷载作用下动力响应问题对于道路结构设计和环境振动影响分析都具有重要意义.地基土体是一种具有多相组成和骨架孔隙结构的复杂介质,在动力作用下由于土体内部存在多场耦合效应,使其动力响应分析变得非常复杂.将地基土体视为固体骨架和孔隙水组成的两相饱和介质,利用Biot多孔介质波动理论进行动力响应分析已经相当成熟[1 -4 ] .徐斌等[5 ] 根据Biot波动理论,采用传递、反射矩阵方法研究了移动荷载作用下层状饱和土动力响应问题.王立安等[6 ] 对非均匀饱和地基的动力特性做了研究.徐长节等[7 ] 和周凤玺等[8 ] 基于Vardoulakis等[9 ] 的理论研究了非饱和土中波的传播规律.李绍毅[10 ] 采用半解析法研究了移动荷载作用下多层非饱和铁路地基的共振问题,分析了土体饱和度对非饱和地基振动的影响.Lu等[11 ] 研究了矩形移动荷载作用下非饱和地基的动力响应.Fang等[12 ] 研究了列车荷载作用下非饱和地基的振动响应.Song等[13 ] 对埋置荷载作用下的非饱和地基动力响应问题做了研究. ...
... 利用式(10)对式(2)$\sim$式(9)进行三重Fourier变换和算子运算,并通过降阶法求解常微分方程组得到非饱和土的位移、孔压及应力通解,详细解法参见文献[11 -12 ,14 -15 ]. ...
Study on dynamic responses of unsaturated railway subgrade subjected to moving train load
3
2018
... 地基在移动荷载作用下的动力响应一直是岩土工程和交通工程领域的重点关注课题.随着运输业的发展,车辆的行驶速度越来越快,载重也越来越大,在此背景下研究地基土在移动荷载作用下动力响应问题对于道路结构设计和环境振动影响分析都具有重要意义.地基土体是一种具有多相组成和骨架孔隙结构的复杂介质,在动力作用下由于土体内部存在多场耦合效应,使其动力响应分析变得非常复杂.将地基土体视为固体骨架和孔隙水组成的两相饱和介质,利用Biot多孔介质波动理论进行动力响应分析已经相当成熟[1 -4 ] .徐斌等[5 ] 根据Biot波动理论,采用传递、反射矩阵方法研究了移动荷载作用下层状饱和土动力响应问题.王立安等[6 ] 对非均匀饱和地基的动力特性做了研究.徐长节等[7 ] 和周凤玺等[8 ] 基于Vardoulakis等[9 ] 的理论研究了非饱和土中波的传播规律.李绍毅[10 ] 采用半解析法研究了移动荷载作用下多层非饱和铁路地基的共振问题,分析了土体饱和度对非饱和地基振动的影响.Lu等[11 ] 研究了矩形移动荷载作用下非饱和地基的动力响应.Fang等[12 ] 研究了列车荷载作用下非饱和地基的振动响应.Song等[13 ] 对埋置荷载作用下的非饱和地基动力响应问题做了研究. ...
... 根据混合物理论,考虑固-液-气之间的惯性耦合及毛细管压力,非饱和土的运动方程写为[12 -13 ] ...
... 利用式(10)对式(2)$\sim$式(9)进行三重Fourier变换和算子运算,并通过降阶法求解常微分方程组得到非饱和土的位移、孔压及应力通解,详细解法参见文献[11 -12 ,14 -15 ]. ...
Dynamic response of unsaturated full-space caused by a circular tunnel subjected to a vertical harmonic point load
4
2020
... 地基在移动荷载作用下的动力响应一直是岩土工程和交通工程领域的重点关注课题.随着运输业的发展,车辆的行驶速度越来越快,载重也越来越大,在此背景下研究地基土在移动荷载作用下动力响应问题对于道路结构设计和环境振动影响分析都具有重要意义.地基土体是一种具有多相组成和骨架孔隙结构的复杂介质,在动力作用下由于土体内部存在多场耦合效应,使其动力响应分析变得非常复杂.将地基土体视为固体骨架和孔隙水组成的两相饱和介质,利用Biot多孔介质波动理论进行动力响应分析已经相当成熟[1 -4 ] .徐斌等[5 ] 根据Biot波动理论,采用传递、反射矩阵方法研究了移动荷载作用下层状饱和土动力响应问题.王立安等[6 ] 对非均匀饱和地基的动力特性做了研究.徐长节等[7 ] 和周凤玺等[8 ] 基于Vardoulakis等[9 ] 的理论研究了非饱和土中波的传播规律.李绍毅[10 ] 采用半解析法研究了移动荷载作用下多层非饱和铁路地基的共振问题,分析了土体饱和度对非饱和地基振动的影响.Lu等[11 ] 研究了矩形移动荷载作用下非饱和地基的动力响应.Fang等[12 ] 研究了列车荷载作用下非饱和地基的振动响应.Song等[13 ] 对埋置荷载作用下的非饱和地基动力响应问题做了研究. ...
... 根据混合物理论,考虑固-液-气之间的惯性耦合及毛细管压力,非饱和土的运动方程写为[12 -13 ] ...
... 根据有效应力原理,非饱和土本构关系写为[13 ] ...
... 式中,$A_{11}$$\sim$$A_{14}$, $A_{21}$$\sim$$A_{24}$见参考文献[13 ]. ...
一类二阶微分方程组的通解
1
2007
... 利用式(10)对式(2)$\sim$式(9)进行三重Fourier变换和算子运算,并通过降阶法求解常微分方程组得到非饱和土的位移、孔压及应力通解,详细解法参见文献[11 -12 ,14 -15 ]. ...
一类二阶微分方程组的通解
1
2007
... 利用式(10)对式(2)$\sim$式(9)进行三重Fourier变换和算子运算,并通过降阶法求解常微分方程组得到非饱和土的位移、孔压及应力通解,详细解法参见文献[11 -12 ,14 -15 ]. ...
一类二阶常微分方程组的通解
1
2009
... 利用式(10)对式(2)$\sim$式(9)进行三重Fourier变换和算子运算,并通过降阶法求解常微分方程组得到非饱和土的位移、孔压及应力通解,详细解法参见文献[11 -12 ,14 -15 ]. ...
一类二阶常微分方程组的通解
1
2009
... 利用式(10)对式(2)$\sim$式(9)进行三重Fourier变换和算子运算,并通过降阶法求解常微分方程组得到非饱和土的位移、孔压及应力通解,详细解法参见文献[11 -12 ,14 -15 ]. ...
Steady state responses of poroelastic half-space soil medium to a moving rectangular load
5
2007
... 由Biot波动理论,饱和土动力控制方程为[16 ] ...
... 式中各参数定义参见文献[16 ],其中上标“*”表示饱和土对应的物理量. ...
... 对前文推导结果进行编程计算,关于式(11)、式(12)和式(16)、式(17)的Fourier逆变换可通过数值积分或离散Fourier逆变换实现,本文中采用计算效率较高的离散Fourier逆变换实现.引入移动坐标轴$X_t$,$X_t=x-ct$,使计算结果能以振源为中心分布.取上层非饱和土的饱和度$S_{\rm r}=1$,则半空间地基退化为单一饱和半空间,此时,有效应力参数$\chi=1$.则上、下层土体的特性参数值相同,土体参数取值与文献[16 ]相同,按文献[16 ]给定计算参数进行取值计算,其中主要参数的取值有:Lamb常数$\mu$取30 MPa,$n$取0.3;非饱和土中固体和水的质量密度$\rho_{\rm s}$和$\rho_{\rm w}$的取值分别为2700 kg/m$^{3}$和1000 kg/m$^{3}$.图2 为本文退化解与单层饱和半空间模型[16 ]的结果对比,图中显示,退化解与文献解能够很好地吻合.(图中$\bar{{u}}_{z}$为无量纲竖向位移,$\bar{{u}}_{z} ={{u_{z} \mu^{\ast }}/{\left( {aq_{0} }\right)}}$.) ...
... ]相同,按文献[16 ]给定计算参数进行取值计算,其中主要参数的取值有:Lamb常数$\mu$取30 MPa,$n$取0.3;非饱和土中固体和水的质量密度$\rho_{\rm s}$和$\rho_{\rm w}$的取值分别为2700 kg/m$^{3}$和1000 kg/m$^{3}$.图2 为本文退化解与单层饱和半空间模型[16 ]的结果对比,图中显示,退化解与文献解能够很好地吻合.(图中$\bar{{u}}_{z}$为无量纲竖向位移,$\bar{{u}}_{z} ={{u_{z} \mu^{\ast }}/{\left( {aq_{0} }\right)}}$.) ...
... 为本文退化解与单层饱和半空间模型[16 ]的结果对比,图中显示,退化解与文献解能够很好地吻合.(图中$\bar{{u}}_{z}$为无量纲竖向位移,$\bar{{u}}_{z} ={{u_{z} \mu^{\ast }}/{\left( {aq_{0} }\right)}}$.) ...






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}