基于非线性级联系统的弹性关节空间机器人新型滑模控制1)
A NOVEL SLIDING MODE CONTROL OF ELASTIC-JOINT SPACE ROBOT BASED ON NONLINEAR CASCADE SYSTEMS1)
基于非线性级联系统的弹性关节空间机器人新型滑模控制1) |
| 梁捷, 秦开宇, 陈力 |
|
A NOVEL SLIDING MODE CONTROL OF ELASTIC-JOINT SPACE ROBOT BASED ON NONLINEAR CASCADE SYSTEMS1) |
| LIANG Jie, QIN Kaiyu, CHEN Li |
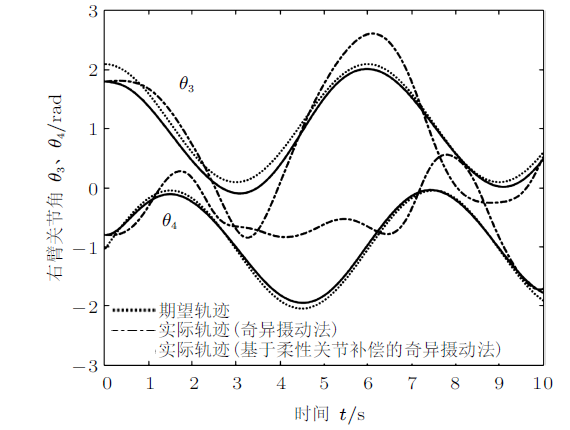
| 图10 右臂关节角$\theta_{3},\theta_{4} $的三种控制算法轨迹跟踪图(关节柔性刚度15 N$\cdot$m/rad) |
|
|