

传统的一次性使用运载火箭在完成发射任务后,不能进行回收利用,成本很高,如果运载火箭能够回收并重复使用,其发射成本会大幅度降低。此外,由于我国三大发射基地在内陆,运载火箭子级,助推器,整流罩等的坠落,会威胁到当地居民生命财产安全,如果能够落入指定区域,则可以消除这些隐患。因此,回收运载火箭对我国有着特殊意义[1]。
本文提出一种新的基于拉网主动控制的运载火箭着陆策略,旨在降低运载火箭软着陆风险,提高可靠性。
1 垂直返回技术介绍
运载火箭垂直返回主要分为两个阶段,第一阶段为运载火箭自主返回及在目标物上空悬停,第二阶段为着陆。
1.1 第一阶段
基于推力器反推的运载火箭软着陆控制策略,其本质是一个12维度约束下的最优控制问题,要求在同一时刻实现位置,速度,角度,角速度同时为0。
由于控制偏差的存在,运载火箭的着陆机构势必不会同时与地面接触,接触导致的单边弹性力干扰力矩可能会使箭体倾倒,引起回收任务失败,从工程安全考虑,一般先实现箭体在目标靶位上空一定距离处悬停。
1.2 第二阶段
减小火箭推力,运载火箭在重力作用下缓缓降落并着陆。在运载火箭自身携带的着陆机构的帮助下,实现运载火箭平稳着陆。
该过程中,最为关键的是吸收着陆冲击载荷的缓冲器技术,实践表明,基于推力器反推软着陆的运载火箭回收方案,技术难度大,对控制要求较高,稍有不慎即可能导致回收任务功亏一篑。
2 拉网主动控制
2.1 工作流程
针对垂直返回运载火箭着陆阶段可靠性不足,提出一种基于拉网主动控制的运载火箭回收策略,以增加垂直返回运载火箭的回收可靠性。
其工作流程如图1。
图1

2.2 工作原理
运载火箭与网面接触后,如果不进行主动控制,运载火箭势必会在干扰力作用下,朝某个方向倒下,其倒下的方向在二维水平面上是随机的。因此,运载火箭与网面接触后必须开始执行网面主动控制。
为简化问题描述,以一维控制为例对拉网控制过程进行描述。拉网回收系统工作原理如图2。
图2
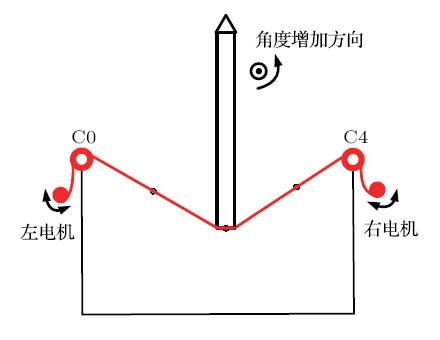
表1 控制电机转向与姿态位置控制效果对应关系
| 序号 | 左电机 | 右电机 | 控制角 | 控制效果 |
|---|---|---|---|---|
| 1 | 顺时针 | 顺时针 | 左右相等 | 姿态减 |
| 2 | 逆时针 | 逆时针 | 左右相等 | 姿态加 |
| 3 | 顺时针 | 逆时针 | 左右相等 | 位置升高 |
| 4 | 逆时针 | 顺时针 | 左右相等 | 位置降低 |
实际上,当左右电机转角不同时,即可实现对运载火箭姿态和轨道同时控制。
2.3 执行机构
将上述一维控制扩展为二维控制,即实现运载火箭姿态和位置在空间中的主动控制,拉网控制系统外形示意图如图3。
图3
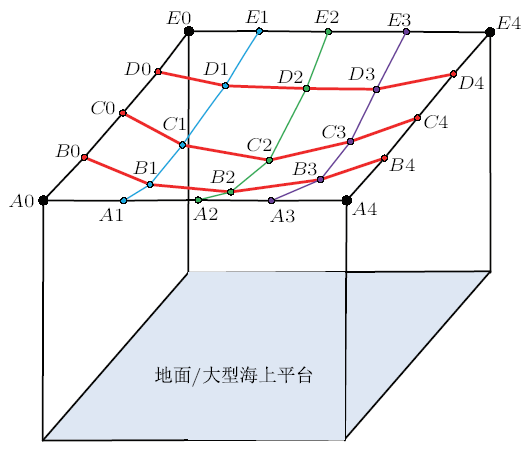
图中, $A0$,$A4$,$E0$,$E4$为结构固定点;$B0$,$C0$,$D0$,$B4$,$C4$,$D4$, $A1$,$A2$,$A3$, $E1$,$E2$,$E3$为需要电机控制的点;$B1$,$B2$,$B3$,$C1$,$C2$,$C3$,$D1$,$D2$,$D3$为网间节点。
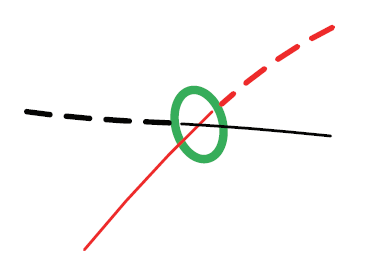
网间节点,是指纵横两线的交点,两条线在网间节点处可自由穿梭,但在竖直方向需保持一致,见示意图4。
图4
拉网控制分为横轴(01234方向)控制和纵轴($ABCDE$方向)控制,通过各控制点对各自缆绳长度的控制,可以实现运载二维姿态控制和运载火箭高低方向的位置控制,实际上,两个维度协同控制时,还可实现运载火箭有限范围平移,最终能实现运载火箭二维姿态控制和三维位置的控制。
注:绕滚动方向不受拉网主动控制,运载火箭受网摩擦力矩作用,初步设计可将滚动角和滚动角速度视为0。
2.4 测量子系统
运载火箭配置GPS,陀螺仪,加速度计等传感器,且运载火箭与地面拉网着陆系统之间可以实现高速通讯,地面系统能准确获知运载火箭的姿态和位置信息。
除了实时接收运载火箭上的姿态和位移信号,拉网控制系统自身也具有双目视觉等传感器系统,可以与从运载火箭获得的信息进行融合,提升测量置信度。
组成网面的控制缆绳配置还可配置拉力传感器,还可实时计算网面承力(即运载火箭所受反作用力)情况。
3 设计约束及要点
3.1 网洞大小设计
图5
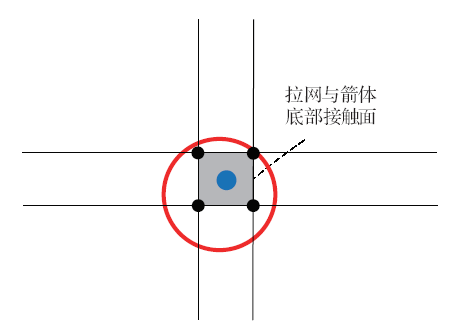
从图5可以看出,当系统平衡时,运载火箭质心必然在蓝色点附近小幅波动,也就是说,稳定时箭体并不是垂直于地表的,倾斜角度与箭体底部落在拉网的位置有关。此外,真正用于控制的是与箭体有接触的两组(横纵各一组)拉绳,其他拉绳主要是起保护作用。
3.2 滚动控制可行性分析
控制箭体某组拉绳由多根相互平行的拉绳组成,多根拉绳之间共同进退,如果拉绳与箭体底部没有相对滑动,理论上可以阻尼箭体滚动角速度,也不会激发箭体滚动角速度。
但是,拉绳有弹性,电机控制存在误差,因此,同一组拉绳中每条拉绳可能会存在相对位移,呈现出零均值的近似正弦运动,若箭体结构桡性模态与系统控制参数和拉绳弹性系数等不匹配,可能无法阻尼箭体滚动姿态,甚至可能激发箭体滚动姿态,因此,拉绳弹性,电机控制误差,箭体结构桡性模态参数、控制参数之间的匹配性设计是一项关键技术。
运载火箭初始滚动轴角动量主要通过控制电机吸收,因此,要求箭体初始滚动角动量足够小,以避免由于滚动角速度过大而出现箭体与拉绳之间打滑的现象。
虽然滚动角速度不可能绝对为0,但由于箭体滚动角速度较小,其形成的陀螺效应对其他两轴控制影响可忽略。
3.3 俯仰偏航控制可行性分析
着网后的箭体控制,可以视为平面倒立摆[6],通过电机控制拉绳的运动方向,拉绳作用于运载火箭底部的摩擦力,提供俯仰和偏航方向控制力矩,实现俯仰偏航姿态控制。
3.4 系统控制参数设计
箭体质量大,且结构相对比较脆弱。为了尽量避免对箭体的损伤,拉绳必须有足够弹性。要实现箭体的位置上下方向控制并最终引导箭体软着陆,拉绳会比较长,简单力学分析可知,箭体不同高度,拉绳受拉力是不同的,此外,对不同的运载火箭,相同高度时,拉绳所受拉力也不同,因此,该拉网控制系统本质上是一个变参数系统。
拉绳的弹性系数,箭体重量,箭体相对位置等参数均可视为已知,在设计电机控制参数和计算电机控制转角转速时,需将上述参数作为输入前馈,而且,控制参数设计应考虑好足够的裕度。
3.5 防滑设计
当箭体初始俯仰/偏航角或角速度过大,箭体底部与拉网之间的摩擦力(摩擦力的最大值可简单认为是箭体重力×静摩擦系数)不足以提供足够的控制力矩,会出现两者之间的相对滑动,会引起箭体失控而倒台。因此,箭体初始俯仰/偏航角和角速度不能过大,而且,在选择拉绳材质和表面处理时,应尽量提升其摩擦系数。
此外,即使箭体为理想姿态,但若控制力矩为大噪声的高频力矩(可能是测量噪声或控制噪声引起),由于箭体惯量大,来不及响应高频噪声控制力矩,也会导致箭体和拉绳之间出现不必要的滑动,弱化拉网控制能力或导致回收失败。
为了减小不必要的噪声控制力矩,首先,需要箭体姿态及角速度估计精度尽量高;其次,应选用高精度,响应快的控制电机,尽量减小控制电机的高频力矩噪声;再次,所选用的拉绳也应具有一定弹性,滤除部分控制电机所产生的高频力矩噪声。
3.6 工程应用分析
根据拉网各项性能指标参数,可以计算出运载要求,比如对运载重量,结构受力裕度等提出要求,同样地,拉网控制系统各项指标设计也需要参考运载指标,两者设计存在相互迭代的过程。
虽然拉网有一定姿态和位置纠偏能力,但如果第一阶段初值(位置,姿态,姿态和角速度)过大,超过拉网控制能力范围,则任务可能会失败。
该方法一定程度上可以提高基于反推器反推的运载火箭回收可靠性,但是,运载火箭尾部与柔性网面接触,可能使得运载火箭尾部结构受力不均,最终造成运载火箭尾部结构损伤,需对运载火箭尾部结构进行加固和适应性设计。
滚动方向不受拉网主动控制,需要进一步深入分析滚动角和角速度对整个控制系统的影响。
4 结论
针对垂直降落火箭回收时风险大,可靠性裕度相对不足的缺点,提出了主动拉网控制策略,为运载火箭的回收提供一个新的思路。
拉网控制策略不仅适用于运载火箭回收,对于在重力条件下,需同时控制物体姿态和位置的任务,也有一定启发作用。
参考文献
运载火箭子级回收技术研究
Recovery technology of launch vehicle stage
"猎鹰9"运载火箭海上平台成功回收的分析及启示
Analysis and enlightenment of successful retrieval of "Falcon 9" rocket on offshore platform
从竹筒粽子说起——浅谈火箭回收相关的航天原理
Rice dumplings in bamboo tube and rocket recovery technology
垂直着陆重复使用运载火箭对动力技术的挑战
Challenge to propulsion technology for vertical landing reusable launch vehicle
平面倒立摆自适应滑模模糊控制
Adaptive sliding mode fuzzy control of planar inverted pendulum
转动惯量存在不确定性的挠性航天器动态自适应滑模姿态控制
Dynamic adaptive sliding attitude control for flexible spacecraft with inertia uncertainty
一种基于模态参数实时辨识方法的参数时变航天器控制方法
A time-varying spacecraft control method based on real-time system state estimation
人工智能在航天器控制中的应用
Application of artificial intelligence in spacecraft
超静定捆绑火箭传力试验设计方法
The design of the force transfer test for statically indeterminate rockets

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}