

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
笛沙格定理的结构力学分析再证明
[王崇安2)  , 邢沁妍]
, 邢沁妍]
, 邢沁妍]
|
|


结构力学中的几何组成分析方法与射影几何存在深刻的内蕴关系. 这种内蕴关系可以被用于笛沙格定理的证明. 通过构造一种特殊的杆件体系,从几何组成分析与受力分析两个角度进行分析,采用“算两次思想”分别得出杆件体系几何可变分别与笛沙格定理的条件与结论等价,从而证明笛沙格定理与其逆定理.
笛沙格定理(Desargues’ Theorem)是平面射影几何中一条著名定理, 由数学家笛沙格(Girard Desargues)于1639年提出, 是射影几何学的开端. 过去150年内, 众多力学家在射影几何的范畴研究杆系结构的几何组成. 1863年, Rankine[1]提出了结构自由度的仿射不变性. 1982年, Wunderlich[2]从几何组成分析的角度阐明了结构的射影不变性; 同年, Crapo等[3]从受力分析的角度阐明了结构的射影不变性.
由于笛沙格定理深刻的对称性与几何学内涵, 迄今为止, 众多专家学者给出了许多种基于几何法或是综合法的证明[4]. 然而, 尽管结构的几何组成和内力有着良好的射影几何性质, 却没有文献从结构力学的角度诠释笛沙格定理. 基于对力学的重要分支— — 结构力学的学习与实践, 本文开创性的从结构力学的角度对笛沙格定理进行分析再证明. 依次构造平面和空间杆件体系, 从几何组成分析与受力分析两个不同的角度, 运用铰接三角形规律[5]与零载法[6], 在射影几何范畴内分析该种体系的几何组成[7], 证明了笛沙格定理的平面和空间两种情形, 揭示了结构力学和射影几何的联系.
笛沙格定理建立于射影平面的一种模型— — 拓广平面上. 在此首先给出拓广平面的定义[8].
拓广平面可以看作由欧几里得平面和一条无穷远直线的组合. 拓广平面内的点和直线定义如下:
(1) 在每一条欧几里得平面的直线上, 添加一个无穷远点, 构成拓广平面上的直线.
(2) 相互平行的直线上的无穷远点相同, 不平行直线上的无穷远点不同.
(3) 无穷远点的集合构成无穷远直线.
拓广平面满足如下两条重要性质[9]:
(1) 任意两点确定一条直线. 其中, 两个无穷远点确定一条无穷远直线.
(2) 任意两条直线相交于一点. 其中平行直线相交于无穷远点.
拓广平面上, 笛沙格定理及其逆定理叙述如下:
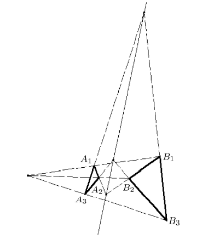
笛沙格定理(Desargue’ s theorem) 图1所示, 对于拓广平面上的两个三角形, 如果它们的3个对应顶 点的连线
 | 图1 笛沙格定理示意图 |
逆定理 如图1所示, 对于拓广平面上的两个 三角形, 如果它们的三个对应边所在直线的交点共线, 那么 它们的3个对应顶点的连线
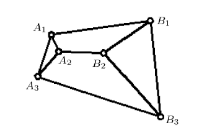
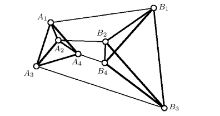
为证明笛沙格定理, 构造如图2所示的平面杆件体系. 在结构力学几何组成分析的范畴内, 该杆件体系的每一个杆件均视为刚体, 每一个铰点均视为理想铰约束. 下文对其进行几何组成分析.
图中共有9根链杆和6个复铰点, 其中每个铰点连接三根杆. 以图示体系链杆作为分析对象, 每根链杆有两个平动自由度与一个 转动自由度, 共27个自由度数, 每个复铰连接3根链杆, 约束住4个自由度. 总约束数为24个. 如果所有约束均为有效约束, 体系仅有3个刚体自由度, 其内部即为几何不变体系. 否则, 如存在多余约束, 体系内部即为几何可变体系.
对体系杆件的内力进行受力分析可以判断是否存在多余约束, 而对体系的可变性做出几何分析可以判断体系是否为可变体系. 根据 结构力学的理论, 两种分析方法得出的结果等价, 下文分别从这两个角度出发证明笛沙格定理.
结构力学给出的平面几何组成分析铰接三角形规律有以下两种等价的表述形式[5]:
如果两个刚片由3个链杆相连, 那么结构为几何可变体系, 当且仅当三链杆共点.
如果3个刚片两两铰接, 那么结构为几何可变体系, 当且仅当三铰共线. 其中, 两个刚片由两根链杆相连等效于它们由一个虚铰相连, 虚铰的位置在两根链杆的交点处.
根据结构力学理论[5], 铰接三角形规律在拓广平面内适用. 下文将通过几何的方法分析几何组成不变的等价条件.
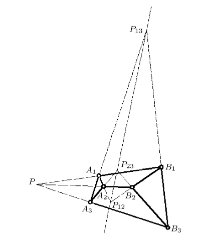
对图2所示的链杆体系. 利用铰接三角形规律, 将
 | 图3 虚铰位置示意 |
将链杆
以上的分析结果可以抽象成图2所示的计算自由度为零的杆件体系几何可变的两个 等价条件, 如下:
(1) 杆件体系为几何可变体系等价于拓广平面内
(2) 杆系为几何可变体系等价于拓广平面内
综合以上两条命题, 可以推导出如下结论:
拓广平面内,
由于在拓广平面内, 任意两点确定一条直线、任意两条直线有唯一交点. 因此, 上述证明具有一般性.
根据前文分析, 如果上述杆系所有约束均为有效约束, 则体系内部即为几何不变体系. 因此, 从多余约束的角度进行分析和从几何可变性角度进行分析得出的结论一致.
根据零载法, 如果结构中不存在多余约束, 那么当结构所受外载荷为0时, 结构中所有构件的内力必然为0. 下文从受力分析的角度分析结构中存在多余约束的等价条件.
仍构造如图2所示的链杆体系.
对铰接三角形
由三个铰铰接形成的三角形为静定体系, 其内部不存在多余约束. 因此整个体系存在多余约束等价于无外载荷时三个连 接链杆中存在非零内力.
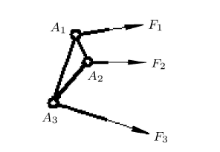
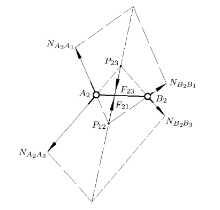
隔离体不受外载荷作用, 因此, 三个轴力达成平衡(如图4所示). 根据力矩平衡, 如果杆件体系的内力有非零解, 那么图3中的三个轴力 的作用线
如果链杆
综合以上两条结论可以得出:杆件体系中的内力存在非零解等价于
对连接链杆进行受力分析. 将链杆
如图5所示, 在切断链杆后, 原有轴力暴露出来.
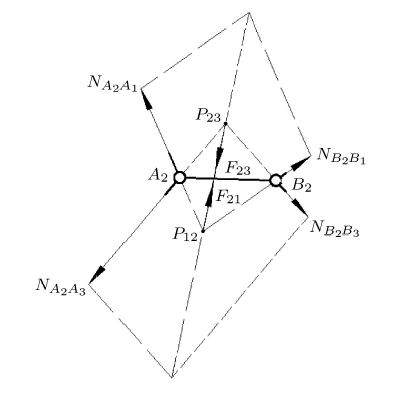 | 图5 隔离体取法 |
同理可得, 如果选取
由作用力与反作用力的关系,
综合以上两条结论,
当
(1)
(2)
(3)
(4) 三个轴力合力大小相等, 其中
任意给定一个轴力合力的大小与方向时, 根据力的分解唯一性, 满足上述4个条件的轴力均存在唯一的非平凡解. 因此, 如果
综合以上对充分性和必要性的分析证明可以得出:结构中的内力存在非零解等价于
通过选取铰接三角形作为隔离体进行受力分析, 杆系中存在非零内力等价于
拓广平面内,
可以看出, 内力分析和几何分析导出了相同的结论.
为了证明平面情形的笛沙格定理, 上文构造了平面杆件体系. 对于空间情形, 可类似的构造空间杆件体系, 以空间杆件体系的几何组 成分析方法分析和证明笛沙格定理的空间情形.
空间笛沙格定理[10] 已知两个四点体的对应点的四条连线交于一点, 那么这两个四点体的对应棱的6个交点在一个平面上.
为了证明空间笛沙格定理, 构造由两个三棱锥和四条链杆组成的杆件体系. 杆系(图6)由两个三棱锥
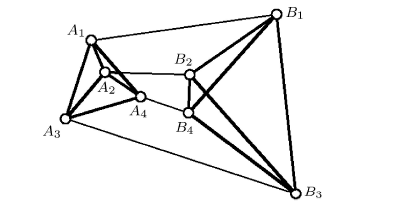 | 图6 空间标系示意 |
倘若四点体的对应点的四条联线交于一点, 那么,
对4根连接链杆进行受力分析. 假设4根链杆
链杆1与链杆2由链杆
按照
对4根链杆列出平衡方程
分析方程(1)可以得出, 由于三力平衡, 因此3个力的作用线必然交于一点. 假设这个点为
根据上文分析, 由于
因此, 欲证明
由于
上文合理构造了平面杆件体系, 从结构力学几何组成分析的角度出发得到杆件体系几何可变的等价条件, 分析证明了射影几何中著名的 笛沙格定理. 从中可见
(1)几何分析和内力分析的思路一致. 几何可变性分析的刚片取法和内力受力分析的隔离体取法一致, 但它们通过不同的理论各自推导到 相同的结论. 这反映了结构力学中几何分析与受力分析的对偶性.
(2)铰接三角形规律和内力平衡方程均在拓广平面内有对应的表述, 这是证明进行的关键. 这反映了拓广平面— — 这一常用的射影平面模型是描述结构几何组成分析的合理的几何学模型[7].
(3)在证明笛沙格定理过程中, 内力分析更能体现笛沙格定理的透视中心与透视轴的本质. 在高维情形的杆件体系构造中, 几何可变性已 经不再是笛沙格定理条件和结论的等价条件, 但是, 内力存在非零解与否, 仍然对笛沙格定理的结构力学证明起到了关键作用.
(4)笛沙格定理是射影几何范畴内的定理, 经过射影变换后, 笛沙格定理仍然成立. 如果对该杆件体系进行射影变换, 两种分析证明仍然不变, 三线共点、三点共线的体系几何性质也不变. 这说明了杆件体系的多余约束存在性和几何可变性仍然不变, 这也反映了几何组成分析和射影几何之间深刻的内蕴联系.
The authors have declared that no competing interests exist.
| 1 |
|
| 2 |
|
| 3 |
|
| 4 |
|
| 5 |
|
| 6 |
|
| 7 |
|
| 8 |
|
| 9 |
|
| 10 |
|