
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
非局部应变梯度理论下纳米梁的力学特性研究1)
[张英蓉, 沈火明2)  , 张波]
, 张波]
, 张波]
|
|


基于非局部应变梯度理论,建立了一种具有尺度效应的高阶剪切变形纳米梁的力学模型. 其中,考虑了应变场和一阶应变梯度场下的非局部效应. 采用哈密顿原理推导了纳米梁的控制方程和边界条件,并给出了简支边界条件下静弯曲、自由振动和线性屈曲问题的纳维级数解. 数值结果表明,非局部效应对梁的刚度产生软化作用,应变梯度效应对纳米梁的刚度产生硬化作用,梁的刚度整体呈现软化还是硬化效应依赖于非局部参数与材料特征尺度的比值. 梁的厚度与材料特征尺度越接近,非局部应变梯度理论与经典弹性理论所预测结果之间的差异越显著.
A size-dependent mechanical model of nanobeam is built within the framework of the nonlocal strain gradient theory. The present model considers the nonlocal effects of the strain field and first gradient strain field, as well as the high-order shear deformation effect. Governing equations and boundary conditions are derived simultaneously by using Hamilton’s principle. The Navier-type solutions are developed for nanobeams with simply-supported boundary conditions. Parametric studies are performed to exhibit the static bending, free vibration and linear buckling behaviors of nanobeams with different groups of geometrical and material parameters. It is found that the non-local effect produces a softening effect on the stiffness of the beam while the strain gradient effect produces a hardening effect, the stiffness of nanobeams is significantly dependent on the ratio between the nonlocal parameter and strain gradient parameter. In addition, the stiffness-hardening or stiffness-softing effects become increasingly significant as the thickness is close to the material characteristic and can be negligible when the thickness is sufficient large.
随着工程结构逐渐向微型化、智能化的方向发展, 纳米梁在微机电系统、生物传感器和原子力显微镜 等领域得到日益广泛的应用[1]. 在研究微尺度结构力学性能的诸多方法中, 实验研究由于对试样、仪器和测试方法的严苛要求, 以及对精度控制的困难性而备受局限. 分子动力学模拟和离散位错动力学模拟也因程序计算量巨大, 计算效率较低而难以进行[2]. 在微纳米尺度下, 材料特征长度尺寸接近材料颗粒尺寸, 结构的尺度效应不可忽略, 传统连续介质理论已无法准确预测微纳米 尺度结构的力学性能[3], 因此, 考虑尺度效应的非局部理论[4], 偶应力理论[5], 应变梯度理论[6]等高 阶理论成为微纳米力学领域的研究重点.
非局部理论认为, 结构内某一点的应力不仅与该点的应变有关, 而且与该点附近区域内所有点的应变有关[7]. 应变梯度理 论则将连续体中的每一个物质点看作含有高阶应变的胞元, 据此引入长度尺度参数来表征其对结构力学性能的影响[8]. Lim等[9]在2015年提出了非局部应变梯度理论, 该理论考虑了非局部效应和应变梯度效应. 基于该理论, Li等[10]分析了尺寸相关杆的轴向振动, 得到了不同边界条件下杆的固有频率解析解. Li等[11]建立了非局部应变梯度非线性欧拉--伯努利纳米梁模型, 并进行了屈曲分析, 获得了简支梁的后屈曲挠度和临界屈曲力. Ebrahimi等[12]探究了热环境下功能梯度纳米梁内的波传播行为, 以及温度、非局部效应、应变梯度效应对波频和相速度的影响. Ebrahimi等[13]还建立了非局部应变梯度理论下的非均匀功能梯度纳米板的波传播模型, 并与经典弹性理论模型做了对比.
本文基于非局部应变梯度理论和Reddy高阶剪切变形理论, 建立了纳米梁的动静力学问题理论模型, 以简支纳米梁为例, 给出 了梁的弯曲、振动和屈曲的纳维级数解, 探讨非局部参数、材料特征长度参数及结构尺寸对纳米梁挠度、固有频率和临界屈曲 力的影响.
考虑一个两端简支矩形截面Reddy梁, 梁的横截面积为
$u_1 = u\left( {x, t} \right) + z\phi \left( {x, t} \right) - \\ \qquad c_1 z^3\left[ {\phi \left( {x, t} \right) + \dfrac{\partial }{\partial x}w\left( {x, t} \right)} \right] \quad (1)$
$u_2 = 0, \; \; \; \; \; u_3 = w(x, t) \quad (2)$
式中
$\varepsilon _{xx} = \dfrac{\partial u}{\partial x} + z\dfrac{\partial \phi }{\partial x} - c_1 z^3\left( {\dfrac{\partial \phi }{\partial x} + \dfrac{\partial ^2w}{\partial x^2}} \right) \quad (3)$
$2\varepsilon _{xz} = \phi - c_2 z^2\left( {\phi + \dfrac{\partial w}{\partial x}} \right) + \dfrac{\partial w}{\partial x} \quad (4)$
其中,
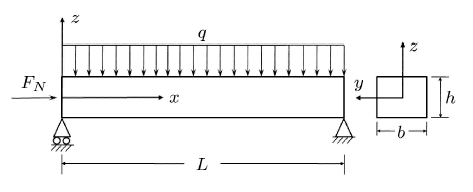 | 图1 纳米梁尺寸参数及坐标设置示意图 |
根据非局部应变梯度理论, 应力可以表示为
其中,
式中,
鉴于非局部应变梯度积分本构方程求解困难, 实际计算中, 常使用其微分形式
其中,
当
局部应变梯度理论下的应力和高阶应力沿横截面的内力分别为
$\left.\begin{array}{1} N = \int_A {t_{xx} } d A\, , \ \ M = \int_A {zt_{xx} } d A \\ P = \int_A {z^3t_{xx} } d A\, , \ \ Q = \int_A {t_{ xz} } d A \\ R = \int_A {z^2t_{\rm xz } } d A \end{array} \right\} \quad (10)$
$\left.\begin{array}{1} N^{(1)} = \int_A {\sigma _{ xx }^{(1)} } d A\, , \ \ M^{(1)} = \int_A {z\sigma _{ xx }^{(1)} } d A \\ P^{(1)} = \int_A {z^3 \sigma _{ xx }^{(1)} } d A\, , \ \ Q^{\left( 1 \right)} = \int_A {\sigma _{ xz }^{(1)} } d A \\ R^{(1)} = \int_A {z^2\sigma _{ xz }^{(1)} } d A \end{array} \right\} \quad (11)$
式中,
纳米梁应变能的变分形式可写为
$\delta U = \int_V {\left( {\sigma _{xx} \delta \varepsilon _{xx} + \sigma _{xx}^{(1)} \nabla \delta \varepsilon _{xx} } \right)} d V +\\ \qquad \int_V {\left( {2\sigma _{xz} \delta \varepsilon _{xz} + 2\sigma _{xz}^{(1)} \nabla \delta \varepsilon _{xz} } \right)} d V \quad(12) $
动能的变分形式为
$\delta T = \int_0^L {\rho A\left( {\dfrac{\partial u_1 }{\partial t}\dfrac{\partial \delta u_1 }{\partial t} + \dfrac{\partial u_2 }{\partial t}\dfrac{\partial \delta u_2 }{\partial t} + \dfrac{\partial u_3 }{\partial t}\dfrac{\partial \delta u_3 }{\partial t}} \right)} d x \quad(13) $
考虑轴向压力
$\delta W = \int_0^L {\left( {q\delta w + F_N \dfrac{ d w}{d x}\dfrac{d\delta w}{d x}} \right)} d x \quad (14)$
根据哈密顿原理
将式(12)
$\delta u: - \dfrac{\partial N}{\partial x} = m_0 \dfrac{\partial ^2{ u}}{\partial t^2} \quad (16)$
$ \delta w: - c_1 \dfrac{\partial ^2P}{\partial x^2} - \dfrac{\partial Q}{\partial x} + c_2 \dfrac{\partial R}{\partial x} + q - \dfrac{\partial }{\partial x}\left( {F_N \dfrac{\partial w}{\partial x}} \right)=\\ \qquad - m_0 \dfrac{\partial ^2w}{\partial t^2} - c_1 m_4 \dfrac{\partial ^3\phi }{\partial x\partial t^2}+\\ \qquad c_1^2 m_6 \left( {\dfrac{\partial ^3\phi }{\partial x\partial t^2} + \dfrac{\partial ^4w}{\partial x^2\partial t^2}} \right) \quad (17)$
$ \delta \phi : - \dfrac{\partial M}{\partial x} + c_1 \dfrac{\partial P}{\partial x} + Q - c_2 R =\\ \qquad - m_2 \dfrac{\partial ^2\phi }{\partial t^2} + c_1 m_4 \left( {2\dfrac{\partial ^2\phi }{\partial t^2} + \dfrac{\partial ^3w}{\partial x\partial t^2}} \right) -\\ \qquad c_1^2 m_6 \left( {\dfrac{\partial ^2\phi }{\partial t^2} + \dfrac{\partial ^3w}{\partial x\partial t^2}} \right) \quad (18)$
其中
同时, 根据积分边界项, 可得在
$N = 0 \ \ \hbox{或} \ \ u = 0 \quad (20a) \\ c_1 \dfrac{\partial P}{\partial x} + Q - c_2 R = 0 \ \ \hbox{或} \ \ w = 0 \quad (20b) \\ M - c_1 P + Q^{(1)} - c_2 R^{(1)} = 0 \ \ \hbox{或} \ \ \phi = 0 \quad (20c) \\ N^{(1)} = 0 \ \ \hbox{或} \ \ \dfrac{\partial u}{\partial x} = 0 \quad (20d) \\ - c_1 P - c_2 R^{(1)} + Q^{(1)} = 0 \ \ \hbox{或} \ \ \dfrac{\partial w}{\partial x} = 0 \quad (20e) \\ M^{(1)} - c_1 P^{(1)} = 0 \ \ \hbox{或} \ \ \dfrac{\partial \phi }{\partial x} = 0 \quad (20f) \\ c_1 P^{(1)} = 0 \ \ \hbox{或} \ \ \dfrac{\partial ^2w}{\partial x^2} = 0 \quad (20g)$
控制方程(16)与经典理论下相同, 对式(8)、式(9)进行积分和变换, 可以将式(17)和式(18)转化为位移形式
$ \left( {1 - l^2\dfrac{\partial ^2}{\partial x^2}} \right)\left[ {c_1 EJ\dfrac{\partial ^3\phi }{\partial x^3} - c_1^2 EK\left( {\dfrac{\partial ^3\phi }{\partial x^3} + \dfrac{\partial ^4w}{\partial x^4}} \right)} \right. +\\ \qquad \left. {G\hat {A}\left( {\dfrac{\partial \phi }{\partial x} + \dfrac{\partial ^2w}{\partial x^2}} \right)} \right] - \left( {1 - \mu ^2\dfrac{\partial ^2}{\partial x^2}} \right) \cdot \\ \qquad \left[ {\dfrac{\partial }{\partial x}\left( {F_N \dfrac{\partial w}{\partial x}} \right) - q} \right] =\\ \qquad \left( {1 - \mu ^2\dfrac{\partial ^2}{\partial x^2}} \right)\left[ {m_0 \dfrac{\partial ^2w}{\partial t^2} + c_1 m_4 \dfrac{\partial ^3\phi }{\partial x\partial t^2}} \right. -\\ \qquad \left. { c_1 ^2m_6 \left( {\dfrac{\partial ^3\phi }{\partial x\partial t^2} + \dfrac{\partial ^4w}{\partial x^2\partial t^2}} \right)} \right] \quad (21)$
$\left( {1 - l^2\dfrac{\partial ^2}{\partial x^2}} \right)\left[ {EI\dfrac{\partial ^2\phi }{\partial x^2} - c_1 EJ\left( {2\dfrac{\partial ^2\phi }{\partial x^2} + \dfrac{\partial ^3w}{\partial x^3}} \right)} \right.+\\ \qquad \left. { c_1^2 EK\left( {\dfrac{\partial ^2\phi }{\partial x^2} + \dfrac{\partial ^3w}{\partial x^3}} \right) - G\hat {A}\left( {\phi + \dfrac{\partial w}{\partial x}} \right)} \right] =\\ \qquad \left( {1 - \mu ^2\dfrac{\partial ^2}{\partial x^2}} \right)\left[ {\bar {m}_2 \dfrac{\partial ^2\phi }{\partial t^2} - c_1 \bar {m}_4 \left( {\dfrac{\partial ^2\phi }{\partial t^2} + \dfrac{\partial ^3w}{\partial x\partial t^2}} \right)} \right] \quad (22)$
其中
为方便起见, 引入以下参数来简化方程
$\left.\begin{array}{1} {m}_2 = m_2 - c_1 m_4 \, , \ \ \bar {m}_4 = m_4 - c_1 m_6 \\ \bar {I} = I - c_1 J\, , \ \ \bar {J} = J - c_1 K \\ \tilde {A} = A - c_2 I\, , \ \ \tilde {I} = I - c_2 J\, , \ \ \hat {A} = \tilde {A} - c_2 \; \tilde {I} \end{array} \right\} \quad(24) $
对于简支梁, 其挠度, 转角和分布载荷可以展开为傅里叶级数
$\left.\begin{array} w(x, t) = \sum_{n = 1}^\infty {W_n \sin \dfrac{n\pi x}{L} {\rm e}^{{\rm i}\omega _n t}} \\ \phi (x, t) = \sum_{n = 1}^\infty {\varPhi _n \cos \dfrac{n\pi x}{L}{\rm e}^{{\rm i}\omega _n t}} \end{array} \right\} \quad (25)$
$\left.\begin{array}{1} q\left( x \right) = \sum_{n = 1}^\infty {Q_n \sin \dfrac{n\pi x}{L}} \\ Q_n = \dfrac{2}{L}\int_0^l {q\left( x \right)\sin } \dfrac{n\pi x}{L} d x \end{array} \right\} \quad (26)$
其中,
将式(25)和式(26)代入式(21)和式(22)可得
$\left.\begin{array}{1} A_n = G\hat {A} + c_1 ^2\alpha ^2EK\, , \ \ B_n = G\hat {A} - c_1 \alpha ^2E\bar {J} \\ \mu _n = 1 + \mu ^2\left( {\dfrac{n\pi }{L}} \right)^2\, , \ \ l_n = 1 + l^2\left( {\dfrac{n\pi }{L}} \right)^2 \\ \alpha = \dfrac{n\pi }{L} \end{array} \right\} \quad (29)$
对于纳米梁的静弯曲问题, 挠度和转角与轴向力、频率及时间相关项无关, 令式(27)和式(28)中
$ \left.\begin{array}{1} w(x, t) = \sum_{n = 1}^\infty {\lambda _n } \dfrac{\left( {E\bar {I}\alpha ^2 + B_n } \right)Q\mu _n }{E\alpha ^4l_n \left( {A_n \bar {I} + B_n Jc_1 } \right)}\sin \dfrac{n\pi x}{L} \\ \phi (x, t) = - \sum_{n = 1}^\infty {\dfrac{B_n Q\mu _n }{E\alpha ^3l_n \left( {A_n \bar {I} + B_n Jc_1 } \right)}\cos \dfrac{n\pi x}{L}} \end{array} \right\} \quad(30) $
对于自由振动问题, 高阶惯性项对频率影响较小, 不予考虑(即令
$\omega _n ^2 = \alpha ^4\dfrac{\left( {A_n E\bar {I} + EJc_1 B_n } \right)\; l_n }{\mu _n {\mkern 1mu} m_0 \left( {\alpha ^2E\bar {I} + B_n } \right)} \quad(31) $
对于屈曲问题, 令式(27)和式(28)中
$F_{N{\rm cr}} = \dfrac{1}{\mu _1}\dfrac{\pi ^2El_1}{L^2}\dfrac{A_1 \bar {I} + c_1 B_1 J}{E\bar {I}\left( {\pi }/{L}\right)^2 + B_1 }\quad(32) $
为了探究非局部应变梯度理论下的剪切变形梁模型特点, 采用如下几何和材料参数:
$\bar {w} = - \dfrac{100wEI}{q_0 L^4}\, , \ \ \bar {\omega } = \omega _1 L^2\sqrt {\dfrac{m_0 }{EI}} \, , \ \ \bar {F}_N = \dfrac{F_{N{\rm cr}} L^2}{EI} \quad(33) $
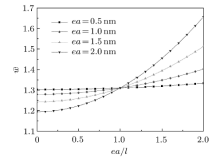
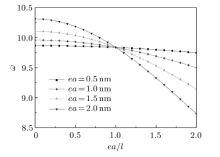
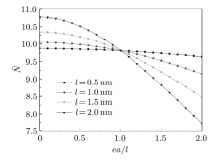
为满足精度要求, 取傅里叶级数前100项, 分别研究非局部参数和材料特征长度的比值对纳米梁弯曲、振动和屈曲 的影响, 如图2
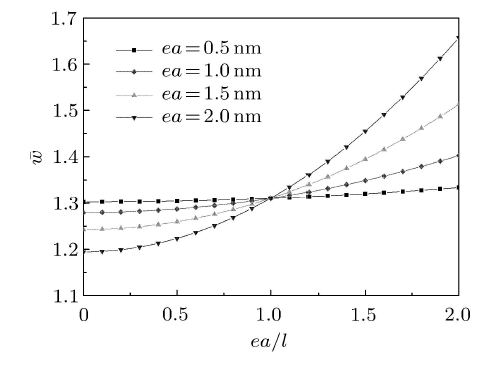 | 图2 非局部参数与材料特征长度的比值对挠度的影响 |
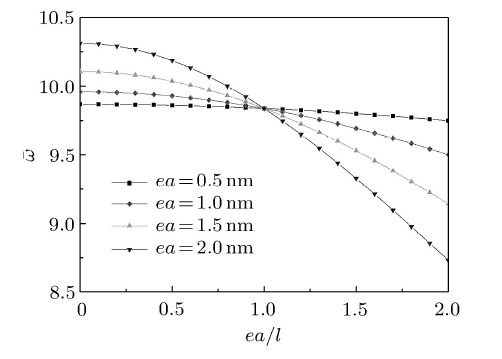 | 图3 非局部参数与材料特征长度的比值对固有频率的影响 |
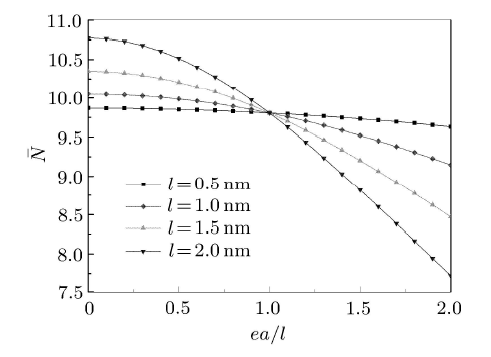 | 图4 非局部参数与材料特征长度的比值对临界屈曲力的影响 |
纳米梁刚度总体随非局部长度参数的增加而降低, 随特征长度参数的增加而增强. 但当
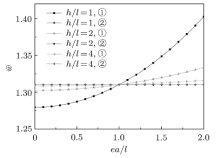
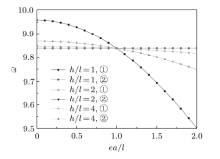
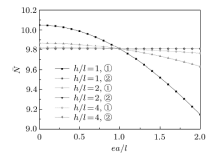
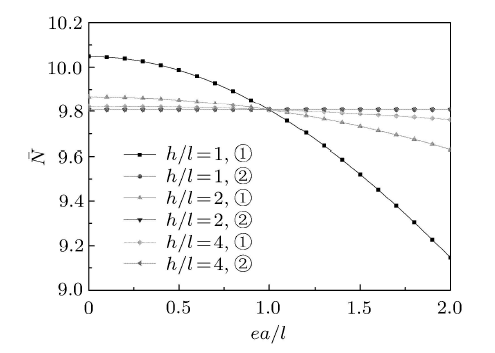
取不同尺寸纳米梁, 分别计算经典弹性理论(图中②)和非局部应变梯度理论(图中①)下的挠度、固有频率和临界屈曲力, 如图5
在非局部应变梯度理论中, 当
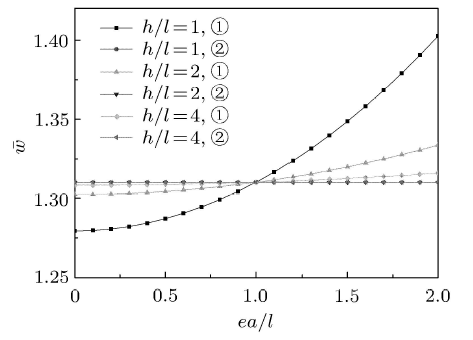 | 图5 两种理论下结构尺寸对挠度的影响 (①为非局部应变梯度理论, ②为经典弹性理论) |
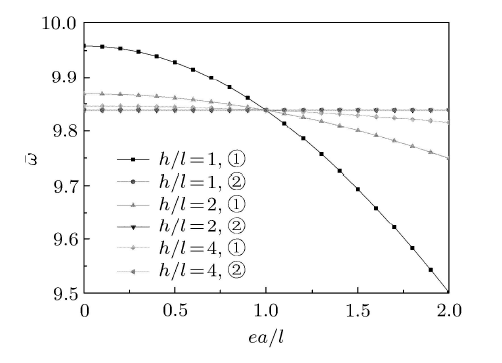 | 图6 两种理论下结构尺寸对固有频率的影响 (①为非局部应变梯度理论, ②为经典弹性理论) |
 | 图7 两种理论下结构尺寸对临界屈曲力的影响 (①为非局部应变梯度理论, ②为经典弹性理论) |
本文从非局部应变梯度理论本构关系出发, 建立了能同时反映剪切变形效应和尺度效应的Reddy梁模型, 并通过哈密顿原理得到了梁的控制方程和边界条件, 求得纳米梁最大弯曲挠度、固有频率和临界屈曲力的解析解, 结合数值算例分析发现:
(1)非局部效应的引入对纳米梁起刚度软化作用, 而应变梯度效应的引入对纳米梁起刚度硬化作用.
(2)当非局部参数大于材料特征长度(
(3)纳米梁高度与材料特征尺度越接近, 非局部应变梯度理论下结果与经典弹性理论结果相比偏差越大.
The authors have declared that no competing interests exist.
| 1 |
|
| 2 |
|
| 3 |
|
| 4 |
|
| 5 |
|
| 6 |
|
| 7 |
|
| 8 |
|
| 9 |
|
| 10 |
|
| 11 |
|
| 12 |
|
| 13 |
|
| 14 |
|
| 15 |
|
| 16 |
|
| 17 |
|
| 18 |
|